Versal カスタム プラットフォーム作成チュートリアル |
手順 2: PetaLinux でのソフトウェア コンポーネントの作成¶
この手順では、Vitis プラットフォームの必須コンポーネントを含む PetaLinux プロジェクトを作成します。
PetaLinux プロジェクトの作成¶
PetaLinux 環境を
source <petaLinux_tool_install_dir>/settings.shで設定します。前の手順で作成した XSA を使用して PetaLinux プロジェクトを作成します。
petalinux-create -t project --template versal --force -n petalinux cd petalinux petalinux-config --get-hw-description=<path to xsa directory> --silentconfig
作成される PetaLinux プロジェクト名は petalinux です。PetaLinux プロジェクト名は petalinux-create -n オプションで自由に変更できます。
VCK190 デバイス ツリーを適用します。
petalinux-configを実行します。[DTG Settings] をクリックします。
MACHINE_NAME オプション (コンフィギュレーション オプション名は CONFIG_SUBSYSTEM_MACHINE_NAME) に versal-vck190-reva-x-ebm-02-reva を入力します。
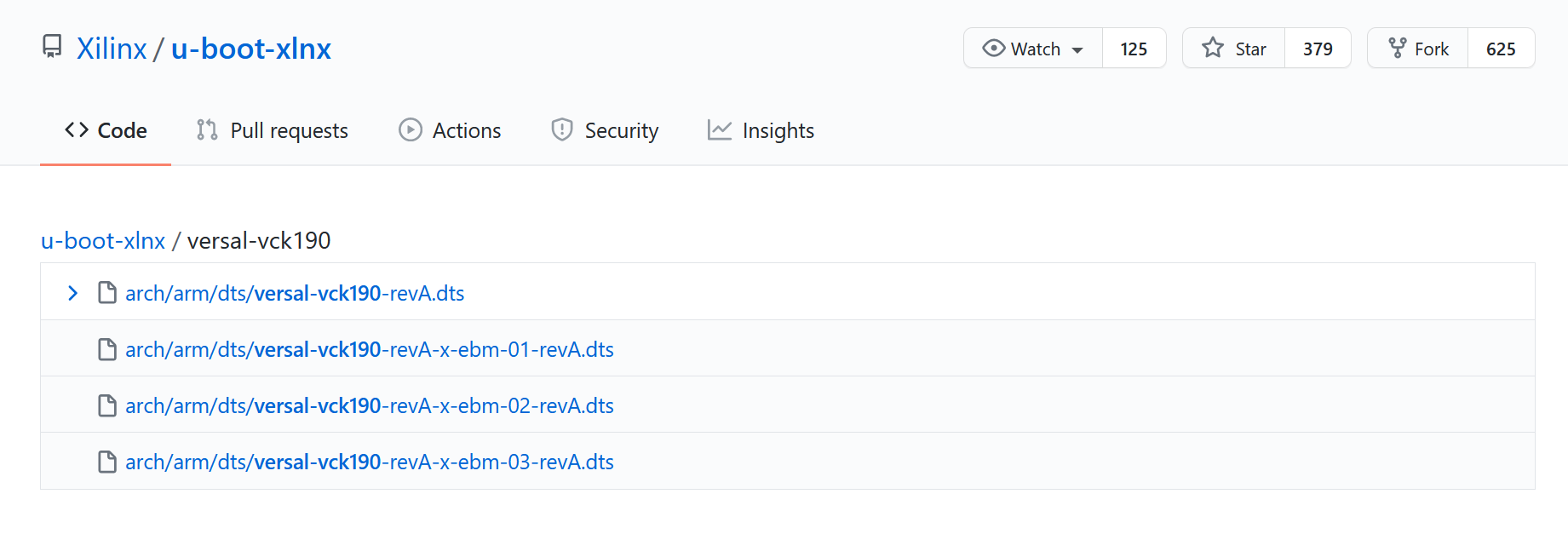
注記: このプリセット デバイス設定により、デバイス ツリーにイーサネット PHY 情報が追加されます。デバイス ツリーのソース コードが PetaLinux プロジェクトに適用されます。VCK190 ボードのバージョンが異なる場合は、デバイス ツリーのソース コード ディレクトリにボードに対応するデバイス ツリーのバージョンがあるかどうかを確認し、PetaLinux プロジェクトで適用してください。git リポジトリをクローンしたり、GitHub のファイル検索機能を使用できます。
ルート ファイル システム、カーネル、デバイス ツリー、および U-Boot のカスタマイズ¶
<your_petalinux_project_dir>/project-spec/meta-user/conf/user-rootfsconfig ファイルに下に示す CONFIG_x 行を追加して、ユーザー パッケージを追加します。
注記: この手順は必須ではありませんが、次の手順で必要なパッケージをすべて見つけやすくなります。
ベースの XRT サポート用のパッケージ (必須):
CONFIG_packagegroup-petalinux-xrt
XRT パッケージ グループには、Vitis アクセラレーション ランタイム用のすべてのパッケージが含まれます。
オンボード アクセラレーション アプリケーション コンパイル サポート用パッケージ (オプション):
CONFIG_packagegroup-petalinux-xrt-dev
パッケージ名には
-devが最後に付き、Yocto で環境をコンパイルする際に必要なヘッダー ファイル、依存ライブラリ、ソフト リンクが含まれます。
システム管理を容易にするパッケージ:
CONFIG_dnf CONFIG_e2fsprogs-resize2fs CONFIG_parted CONFIG_auto-login
dnf はパッケージ管理ツールです。
auto-login はデフォルトでルートとしてログインします。開発やデバッグの際に便利です。プロダクション段階では削除してください。
parted および e2fsprogs-resize2fs は ext4 パーティションを拡張して残りの SD カードを使用できるようにします。
petalinux-config -c rootfsを実行して user packages を選択し、上記すべてのライブラリの rootfs の名前を選択し、保存して終了します。手順 1 を飛ばした場合は、検索機能で/を使用してこれらのパッケージを検索し、イネーブルにしてください。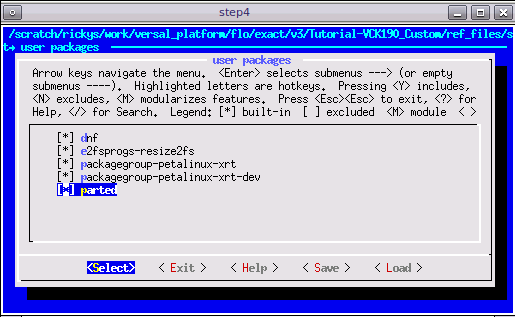
rootfs 設定メニューで [Image Features] を選択し、[package-management] および [debug_tweaks] をオンにし、変更を保存して終了します (推奨)。

システム ユーザー デバイス ツリーをアップデートします (必須)。
project-spec/meta-user/cetie-bsp/device-tree/files/system-user.dtsi ファイルに次の内容を追加します。
zyxclmm_drm ノードは、XRT の一部である zocl ドライバーに必要です。
axi_intc_0 ノードは、32 の割り込み入力を定義します。これは、Vivado のハードウェア設定では推論できませんので、手動でここに追加する必要があります。
注記: サンプル ファイルは ref_files/step2_petalinux/project-spec/meta-user/recipes-bsp/device-tree/files/system-user.dtsi に含まれます。
&amba { zyxclmm_drm { compatible = "xlnx,zocl-versal"; status = "okay"; interrupt-parent = <&axi_intc_0>; interrupts = <0 4>, <1 4>, <2 4>, <3 4>, <4 4>, <5 4>, <6 4>, <7 4>, <8 4>, <9 4>, <10 4>, <11 4>, <12 4>, <13 4>, <14 4>, <15 4>, <16 4>, <17 4>, <18 4>, <19 4>, <20 4>, <21 4>, <22 4>, <23 4>, <24 4>, <25 4>, <26 4>, <27 4>, <28 4>, <29 4>, <30 4>, <31 4>; }; }; &axi_intc_0 { xlnx,kind-of-intr = <0x0>; xlnx,num-intr-inputs = <0x20>; };
EXT4 rootfs サポートを追加します (推奨)。
PetaLinux は、デフォルトで rootfs に initrd 形式を使用します。この形式は、DDR メモリ内の rootfs を抽出します。つまり、実行時に使用可能な DDR メモリが減り、再起動後に rootfs の変更を保持できないことを意味します。ルート ファイル システムで変更が保持できるようにするには、SD カード上の 2 つ目のパーティションとして rootfs に EXT4 形式を使用し、1 つ目のパーティション FAT32 にはほかのブートファイルを保存します。
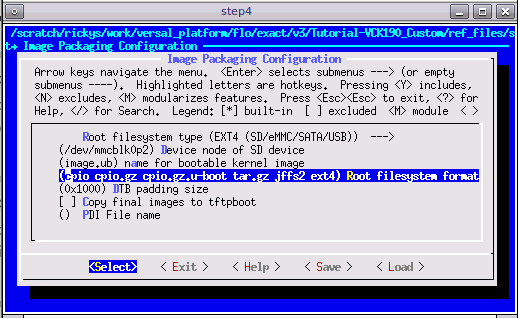
petalinux-configを実行し、[Image Packaging Configuration] に移動し、[Root File System Type] に [EXT4] を選択し、[Root File System Formats] にext4を追加します。
bootargs をアップデートして、ext4 パーティションを system-user.dtsi のルート ファイル システムとして使用します。
/ { chosen { stdout-path = "serial0:115200"; bootargs = "console=ttyAMA0 earlycon=pl011,mmio32,0xFF000000,115200n8 clk_ignore_unused root=/dev/mmcblk1p2 rw rootwait rootfs=ext4"; }; };
注記:
root=/dev/mmcblk1p2は rootfs パスです。rootfs=ext4は rootfs タイプを定義します。ref_files/step2_petalinux/system-user.dtsi の完全な system-user.dtsi を参照してください。
PetaLinux イメージのビルド¶
PetaLinux プロジェクト内の任意のディレクトリから、PetaLinux プロジェクトをビルドします。
petalinux-build
生成された U-Boot イメージと Linux イメージは、images/linux ディレクトリに保存されます。
sysroot をビルドしてインストールします。
petalinux-build --sdk
sysroot sdk.sh は images/linux ディレクトリに生成されます。これは、次の手順で抽出します。
スクリプトを使用した実行¶
PetaLinux プロジェクトを再作成し、出力を生成するスクリプトが提供されています。これらのスクリプトを使用するには、次の手順を実行します。
ビルドを実行します。
# cd to the step directory, e.g. cd step2_petalinux make
生成されたファイルをクリーンアップするには、次を実行します。
make clean
注記: ハードウェア プラットフォームとソフトウェア プラットフォームがすべて生成されます。次に、Vitis プラットフォームをパッケージします。
Copyright© 2020 Xilinx
この資料は 2021 年 2 月 8 日時点の表記バージョンの英語版を翻訳したもので、内容に相違が生じる場合には原文を優先します。資料によっては英語版の更新に対応していないものがあります。 日本語版は参考用としてご使用の上、最新情報につきましては、必ず最新英語版をご参照ください。