Vitis™ Application Acceleration Development Flow Tutorials |
Vitis Getting Started Tutorial¶
Part 4 : Build and Run the Embedded Processor Application¶
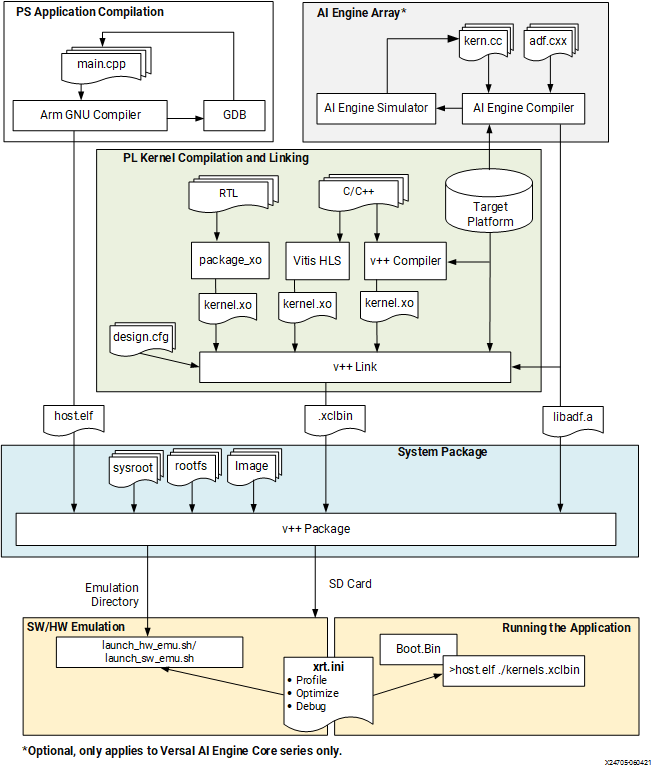
In this fourth part of the Introduction to Vitis tutorial, you will compile and run the vector-add example using each of three build targets supported in the Vitis flow as described below. The overall flow is described in Embedded Processor Application Acceleration Flow, and includes the image flow diagram shown below. From the image you can see the G++ cross-compiler for building the host application for the Arm processor, and the use of the Vitis compiler (v++) for building the Xilinx device binary (xclbin). These are the steps you will be working through in this lab.
Software Emulation - The kernel code is compiled to run on an emulation environment (QEMU) version of the embedded processor. The software emulation target allows quick iterative algorithm refinement through fast build-and-run loops. This target is useful for identifying syntax errors, performing source-level debugging of the kernel code running together with application, and verifying the behavior of the system. Refer to Software Emulation for more information.
Hardware Emulation - The kernel code is compiled into a hardware model (RTL), which is run in the Vivado logic simulator. The host application runs on an emulation environment (QEMU) version of the embedded processor. This build-and-run loop takes longer but provides a detailed, cycle-accurate view of kernel activity. This target is useful for testing the functionality of the logic that will go in the FPGA and getting initial performance estimates. Refer to Hardware Emulation for more information.
Hardware - The kernel code is compiled into a hardware model (RTL) and then implemented on the FPGA, resulting in a binary that will run on the actual FPGA. In the Embedded Processor platform, the host application, xclbin, and required support files are written to an SD card (for instance) and then used to boot and configure the system. Refer to Running the Application Hardware Build for more information.
Building and Running on ZCU102 Zynq MPSoC Embedded Processor Platform¶
Setting up the environment¶
IMPORTANT: This tutorial requires Vitis 2022.1 or later to run.
NOTE: The instructions provided below assume that you are running in a bash shell.
To configure the environment to run Vitis, source the following scripts:
source <VITIS_install_path>/settings64.sh
unset LD_LIBRARY_PATH
Then make sure the following environment variables are correctly set to point to your installed ZCU102 platform, rootfs and sysroot directories respectively.
export PLATFORM_REPO_PATHS=<path to the ZCU102 platform install dir>
export ROOTFS=<path to the ZYNQMP common image directory, containing rootfs>
To properly source the cross-compilation SDK, run the
environment-setup-cortexa72-cortexa53-xilinx-linuxscript in the $ROOTFS directory.
source $ROOTFS/environment-setup-cortexa72-cortexa53-xilinx-linux
NOTE: The ZYNQMP common image file can be downloaded from the Vitis Embedded Platforms page, and contains the Sysroot, Rootfs, and boot Image for Xilinx Zynq MPSoC devices.
Targeting Software Emulation¶
To build for software emulation, enter the following commands to setup the target build directory:
cd <Path to the cloned repo>/Getting_Started/Vitis/example/zcu102
mkdir sw_emu
cp xrt.ini sw_emu
cp run_sw_emu.sh sw_emu
cd sw_emu
Then, after changing into the target build directory, enter the following commands to build the host application and device binary:
$CXX -Wall -g -std=c++11 ../../src/host.cpp -o ./app.exe -I/usr/include/xrt -lOpenCL -lpthread -lrt -lstdc++
v++ -c -t sw_emu --platform xilinx_zcu102_base_202210_1 --config ../../src/zcu102.cfg -k vadd -I../../src ../../src/vadd.cpp -o ./vadd.xo
v++ -l -t sw_emu --platform xilinx_zcu102_base_202210_1 --config ../../src/zcu102.cfg ./vadd.xo -o ./vadd.xclbin
v++ -p -t sw_emu --platform xilinx_zcu102_base_202210_1 --config ../../src/zcu102.cfg ./vadd.xclbin --package.out_dir ./package --package.rootfs ${ROOTFS}/rootfs.ext4 --package.sd_file ${ROOTFS}/Image --package.sd_file ./xrt.ini --package.sd_file ./app.exe --package.sd_file ./vadd.xclbin --package.sd_file ./run_sw_emu.sh
Here is a brief explanation of each of these four commands:
$CXXcompiles the host application using the ARM cross-compiler. This variable contains the full compiler executable plus flags relevant to cross-compilation, and is set when you source the SDK environment setup script. Refer to Building the Host Program for more information.v++ -ccompiles the source code for the vector-add accelerator into a compiled kernel object (.xo file). Refer to Compiling Kernels with the Vitis Compiler for more information.v++ -llinks the compiled kernel with the target platform and generates the FPGA binary (.xclbin file). Refer to Linking the Kernels for more information.v++ -ppackages the host executable, the rootfs, the FPGA binary and a few other files and generates a bootable image. Refer to Packaging for Embedded Platforms for more information.
There are two important differences to take note of here between building for Data Center accelerator cards and building for Embedded Platforms.
The first is the use of the
v++ --packagecommand. This is a required step in the Embedded Processor platform flow, and is largely option in the Data Center flow. The Data Center application runs in the X86 environment, and loads the xclbin from disk. However, in the Embedded Platform flow, generally the processor must be booted from an SD card, and the--packageoption gathers the files and generates the SD card.The second is the
emconfigutilcommand. This command is used in the Data Center flow to build an emulation version of the hardware platform. However, in the Embedded Platform flow, the embedded processor requires the use of an emulation environment (QEMU) as described in Running Emulation. In this flow you will use alaunch_emulationscript rather than the emulation platform.
The -t option of the v++ command specifies the build target. Here it is set to sw_emu so we are building for software emulation.
Notice also the --config option which is used to specify the name of a configuration file containing additional options. Here we are using this configuration file to specify the name of the targeted platform and the mapping of kernel arguments to specific memory banks.
save-temps=1
debug=1
# Enable profiling of data ports
[profile]
data=all:all:all
Building for software emulation is quick and shouldn’t take more than a few minutes. After the build process completes, you can launch the software emulation run as follows:
./package/launch_sw_emu.sh -forward-port 1440 22
This command will launch software emulation, start the Xilinx Quick Emulation (QEMU) environment and initiate the boot sequence. Refer to launch_emulator Utility for more information.
IMPORTANT: You must use the
-forward-portoption as shown above in order to later retrieve files from the QEMU environment as described in Running Emulation on an Embedded Processor Platform.
Once Linux has finished booting, enter the following commands from within the QEMU environment to run the example program:
cd /media/sd-mmcblk0p1
export XILINX_XRT=/usr
export XCL_EMULATION_MODE=sw_emu
./app.exe
You should see the following messages, indicating that the run completed successfully:
INFO: Found Xilinx Platform
INFO: Loading 'vadd.xclbin'
TEST PASSED
If you look at the directory contents for the zcu104/sw_emu directory you should see some of the following files that were created during this exercise:
app.exe: The compiled and linked host application
vadd.xclbin: The device binary linking the kernel and target platform
opencl_trace.csv: A report of events occurring during the application runtime
summary.csv: A report of the application profile
xrt.ini: The runtime initilization file
xrt.run_summary: A summary report of the events of the application runtime
These files and reports are the results of the build and run process targeting the software emulation build. You will be taking a closer look at some of these files in Part 5 of this tutorial. To examine these files later, you must retrieve them from the QEMU environment and copy them into your local system. You can do this using the scp command as described in Running Emulation on an Embedded Processor Platform, for example:
scp -P 1440 root@127.0.0.1:/media/sd-mmcblk0p1/xrt.run_summary ./xrt.run_summary
Press Ctrl+a+x to exit QEMU and return to your bash shell.
Tip: If you have trouble exiting the QEMU environment, you can use
kill -9 <qemu_pid>to kill the process from another terminal window.
Targeting Hardware Emulation¶
To build for hardware emulation, enter the following commands to setup the target build directory:
cd <Path to the cloned repo>/Getting_Started/Vitis/example/zcu102
mkdir hw_emu
cp xrt.ini hw_emu
cp run_hw_emu.sh hw_emu
cd hw_emu
Then, after changing into the target build directory, enter the following commands to build the host application and device binary:
$CXX -Wall -g -std=c++11 ../../src/host.cpp -o app.exe -I/usr/include/xrt -lOpenCL -lpthread -lrt -lstdc++
v++ -c -t hw_emu --platform xilinx_zcu102_base_202210_1 --config ../../src/zcu102.cfg -k vadd -I../../src ../../src/vadd.cpp -o vadd.xo
v++ -l -t hw_emu --platform xilinx_zcu102_base_202210_1 --config ../../src/zcu102.cfg ./vadd.xo -o vadd.xclbin
v++ -p -t hw_emu --platform xilinx_zcu102_base_202210_1 --config ../../src/zcu102.cfg ./vadd.xclbin --package.out_dir package --package.rootfs ${ROOTFS}/rootfs.ext4 --package.sd_file ${ROOTFS}/Image --package.sd_file xrt.ini --package.sd_file app.exe --package.sd_file vadd.xclbin --package.sd_file run_app.sh
Refer to Targeting Software Emulation for a brief explanation of these different commands. The only difference with the previous step is the v++ target (-t) option which is changed from sw_emu to hw_emu. All other options remain the same.
Building for hardware emulation takes more time than for software emulation, but still much less than when targeting the hardware accelerator card. After the build process completes, you can launch the hardware emulation run by using the launch script generated during the packaging step.
./package/launch_hw_emu.sh
Once Linux has finished booting, enter the following commands at the QEMU command prompt to run the example program:
cd /media/sd-mmcblk0p1
export XILINX_XRT=/usr
export XCL_EMULATION_MODE=hw_emu
./app.exe
You should see messages that say TEST PASSED indicating that the run completed successfully
Running the application in the QEMU generates some report files during the run. These files and reports are the results of the run process targeting the software emulation build. You will be taking a closer look at some of these files in Part 5 of this tutorial. To examine these files later, you must retrieve them from the QEMU environment and copy them into your local system. You can do this using the scp command as described in Running Emulation on an Embedded Processor Platform, for example:
scp -P 1440 root@127.0.0.1:/media/sd-mmcblk0p1/xrt.run_summary ./xrt.run_summary
Press Ctrl+a x to exit QEMU and return to your bash shell.
Tip: If you have trouble exiting the QEMU environment, you can use
kill -9 <qemu_pid>to kill the process from another terminal window.
Targeting Hardware¶
To build for the hardware target, , enter the following commands to setup the target build directory:
cd <Path to the cloned repo>/Getting_Started/Vitis/example/zcu102
mkdir hw
cp xrt.ini hw
cp run_hw.sh hw
cd hw
Then, after changing into the target build directory, enter the following commands to build the host application and device binary:
$CXX -Wall -g -std=c++11 ../../src/host.cpp -o app.exe -I/usr/include/xrt -lOpenCL -lpthread -lrt -lstdc++ -O
v++ -c -t hw --platform xilinx_zcu102_base_202210_1 --config ../../src/zcu102.cfg -k vadd -I../../src ../../src/vadd.cpp -o vadd.xo
v++ -l -t hw --platform xilinx_zcu102_base_202210_1 --config ../../src/zcu102.cfg ./vadd.xo -o vadd.xclbin
v++ -p -t hw --platform xilinx_zcu102_base_202210_1 --config ../../src/zcu102.cfg ./vadd.xclbin --package.out_dir package --package.rootfs ${ROOTFS}/rootfs.ext4 --package.sd_file ${ROOTFS}/Image --package.sd_file xrt.ini --package.sd_file app.exe --package.sd_file vadd.xclbin --package.sd_file run_app.sh
To target Hardware, the v++ -t option is set to hw and the emconfigutil command is not needed, as you will be running on an actual hardware platform rather than an emulated platform. All other options remain identical.
Building for hardware targets can take a couple of hours, or more significant time depending on the machine you are building on and its current workload.
After the build process completes, copy the sd_card directory to an SD card and plug it into the platform and boot until you see the Linux prompt. At that point, enter the following commands to run the accelerated application on the Embedded Processor platform:
cd /media/sd-mmcblk0p1
export XILINX_XRT=/usr
./app.exe
You should see the same TEST PASSED message indicating that the run completed successfully. If you look in the zcu102/hw folder you will see some of the files that were created during this build and run process. Refer to Targeting Software Emulation for a brief explanation of the different files.
Congratulations!! You have just completed your first run of a Vitis accelerated application on the ZCU102 card! There are additional Vitis-Tutorials to work through to learn additional details of the Vitis tools, and Vitis_Accel_Examples to use for examples of host application and kernel coding.
Next Step¶
Click here to Visualizing Results and Viewing Reports
License statement
Licensed under the Apache License, Version 2.0 (the “License”); you may not use this file except in compliance with the License. You may obtain a copy of the License at: http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an “AS IS” BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Copyright© 2020–2022 Xilinx