4. Tool Flow Overview¶
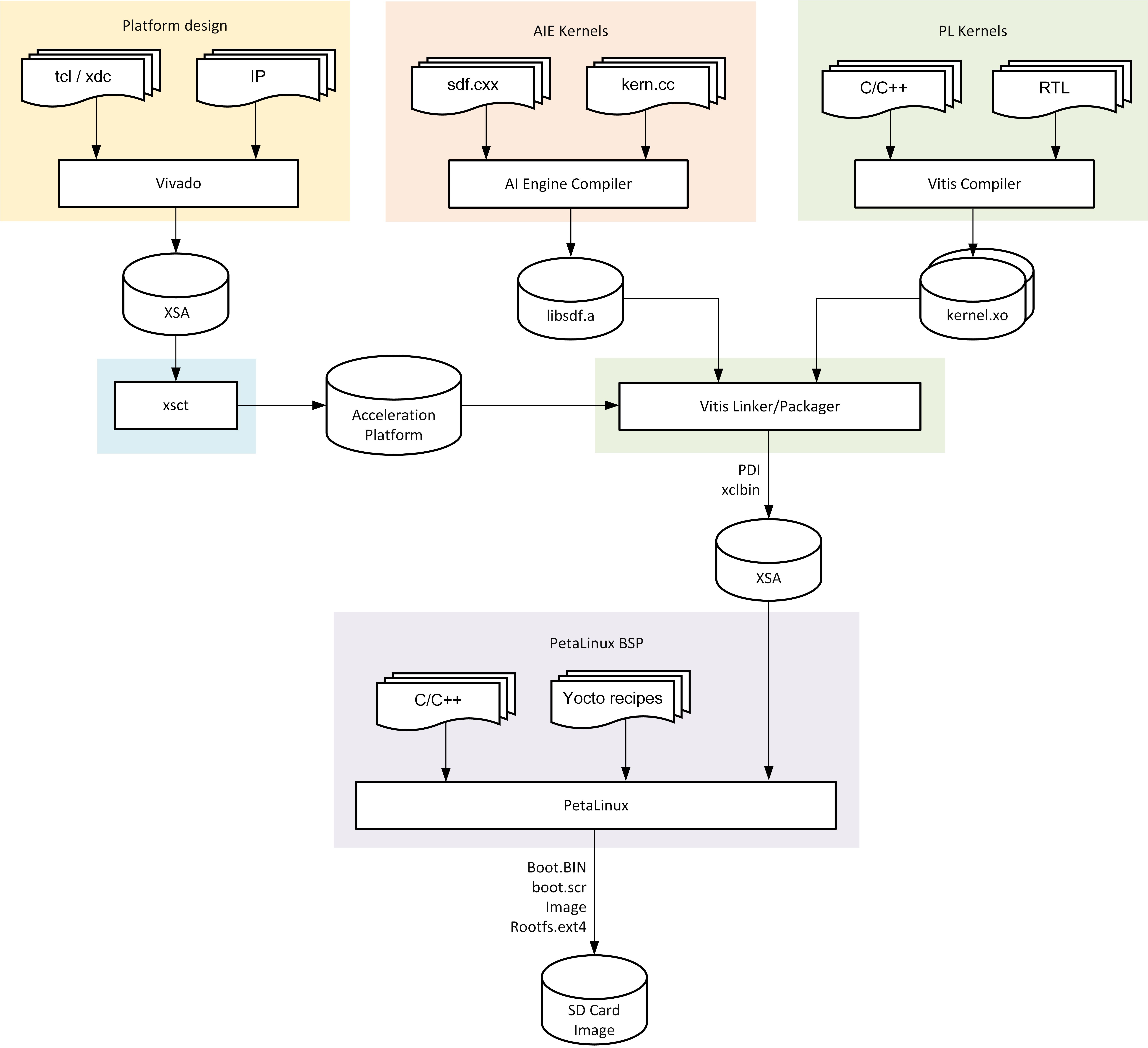
The overall tool flow is outlined in the below diagram. Each step in the tool flow is exlpained in detail in subsequent build tutorials.
At a high level, the builds steps are as follows:
- Vivado platform design: The Vivado design is augmented with platform parameters that describe the meta data and physical interfaces available to the Vitis compiler for stitching in PL and/or AIE kernels.
- Platform creation: The XSCT utility is used to create an extensible platform whose main component is the XSA created by Vivado in step 1.
- AIE kernels:
The AI Engine compiler is used to compile AI Engine kernels and to generate
a graph description. The AI Engine elf and cdo files and the graph
description are packaged into an archive named
libadf.awhich is consumed by the Vitis toolchain during the link and package steps. - PL kernels: The Vitis compiler is used to compile PL accelerator kernels from C/C++ using high-level synthesis (HLS) or to package RTL kernels. The kernels are compiled into xo files and consumed by the Vitis linker in the next step.
- Vitis linker and packager: The Vitis linker integrates the AIE and PL kernels into the platform and implements the design. It generates a new PDI device image as well as xclbin file containing meta data information about the PL/AIE kernels. The Vitis packager is then used to integrate the AIE elfs/cdos into an updated PDI. Finally, the updated PDI and xclbin are packaged as part of the XSA file which is consumed by PetaLinux.
- PetaLinux BSP:
The PetaLinux BSP is a collection of yocto meta layers, recipes, source and
config files that are used to generate a bootable SD card image. The SD card
image consists of two partitions. The boot partition includes the boot image
BOOT.BIN, u-boot scriptboot.scr, Linux kernelImage, and the xclbin file; the second partition contains the root filesystem.