Versal カスタム プラットフォーム作成チュートリアル |
手順 1: Vitis プラットフォームのハードウェア設定¶
Versal エクステンシブル プラットフォームの例では、プラットフォームのプロパティを設定しています。この手順では、これらのプロパティを確認します。
カスタム ボード プラットフォームの場合は、これらのプロパティを手動で設定する必要があります。GUI または Tcl で設定できます。設定フローについては詳しく説明します。
Versal エクステンシブル プラットフォーム例のプラットフォーム設定¶
Vivado を起動して、手順 0 で作成したデザインを開いていない場合は開きます。
ブロック デザインが開いていることを確認します。開いていない場合、Flow Navigator で [Open Block Design] をクリックします。
Tcl コマンドをクロスチェックするブロック図 Tcl をエクスポートします。
[File] → [Export] → [Export Block Diagram] をクリックします。
Tcl ファイルのディレクトリを確認し、[OK] をクリックします。
エクスポートした Tcl ファイルを開きます。
[Platform Setup] タブをクリックします。
このタブが開いていない場合は、[Window] → [Platform Setup] クリックして開きます。
AXI ポート設定を確認します。
axi_noc_ddr4 で S01_AXI から S27_AXI がイネーブルになっているはずです。[SP Tag[ は [DDR] に設定されています。
![[Vivado Platform Setup]: axi_noc_ddr4 AXI Slave](../../../_images/vivado_platform_setup.png)
次は Tcl でこれに該当する設定です。
set_property PFM.AXI_PORT {S00_AXI {memport "S_AXI_NOC" sptag "DDR"} S01_AXI {memport "S_AXI_NOC" sptag "DDR"} S02_AXI {memport "S_AXI_NOC" sptag "DDR"} S03_AXI {memport "S_AXI_NOC" sptag "DDR"} S04_AXI {memport "S_AXI_NOC" sptag "DDR"} S05_AXI {memport "S_AXI_NOC" sptag "DDR"} S06_AXI {memport "S_AXI_NOC" sptag "DDR"} S07_AXI {memport "S_AXI_NOC" sptag "DDR"} S08_AXI {memport "S_AXI_NOC" sptag "DDR"} S09_AXI {memport "S_AXI_NOC" sptag "DDR"} S10_AXI {memport "S_AXI_NOC" sptag "DDR"} S11_AXI {memport "S_AXI_NOC" sptag "DDR"} S12_AXI {memport "S_AXI_NOC" sptag "DDR"} S13_AXI {memport "S_AXI_NOC" sptag "DDR"} S14_AXI {memport "S_AXI_NOC" sptag "DDR"} S15_AXI {memport "S_AXI_NOC" sptag "DDR"} S16_AXI {memport "S_AXI_NOC" sptag "DDR"} S17_AXI {memport "S_AXI_NOC" sptag "DDR"} S18_AXI {memport "S_AXI_NOC" sptag "DDR"} S19_AXI {memport "S_AXI_NOC" sptag "DDR"} S20_AXI {memport "S_AXI_NOC" sptag "DDR"} S21_AXI {memport "S_AXI_NOC" sptag "DDR"} S22_AXI {memport "S_AXI_NOC" sptag "DDR"} S23_AXI {memport "S_AXI_NOC" sptag "DDR"} S24_AXI {memport "S_AXI_NOC" sptag "DDR"} S25_AXI {memport "S_AXI_NOC" sptag "DDR"} S26_AXI {memport "S_AXI_NOC" sptag "DDR"} S27_AXI {memport "S_AXI_NOC" sptag "DDR"}} [get_bd_cells /axi_noc_ddr4]
注記: Vitis エミュレーション自動スクリプトを実行するには、Versal プラットフォーム上の AXI スレーブ インターフェイスに、DDR または LPDDR のいずれかが SP タグに設定されている必要があります。
注記: memport プロパティの S_AXI_NOC が MIG として表示されるのは GUI 表示の問題です。さらに多くの AXI スレーブ ポートをイネーブルにするには、S_AXI_NOC を使用してください。
smartconnect_1 で M01_AXI から M15_AXI がイネーブルになっているはずです。memport は M_AXI_GP に設定されています。[SP Tag] は空です。これらのポートは、PL カーネルの制御に使用されます。
![[Vivado Platform Setup]: AXI Master](../../../_images/vivado_platform_setup_axi_master.png)
次は Tcl でこれに該当する設定です。
set_property PFM.AXI_PORT {M01_AXI {memport "M_AXI_GP" sptag "" memory ""} M02_AXI {memport "M_AXI_GP" sptag "" memory ""} M03_AXI {memport "M_AXI_GP" sptag "" memory ""} M04_AXI {memport "M_AXI_GP" sptag "" memory ""} M05_AXI {memport "M_AXI_GP" sptag "" memory ""} M06_AXI {memport "M_AXI_GP" sptag "" memory ""} M07_AXI {memport "M_AXI_GP" sptag "" memory ""} M08_AXI {memport "M_AXI_GP" sptag "" memory ""} M09_AXI {memport "M_AXI_GP" sptag "" memory ""} M10_AXI {memport "M_AXI_GP" sptag "" memory ""} M11_AXI {memport "M_AXI_GP" sptag "" memory ""} M12_AXI {memport "M_AXI_GP" sptag "" memory ""} M13_AXI {memport "M_AXI_GP" sptag "" memory ""} M14_AXI {memport "M_AXI_GP" sptag "" memory ""} M15_AXI {memport "M_AXI_GP" sptag "" memory ""}} [get_bd_cells /smartconnect_1]
注記: AXI マスターの [SP Tag] は何の効果もありません。
クロック設定を確認します。
[Clock] タブで clk_wizard_0 から tab, clk_out1、clk_out2、clk_out3 を id {1,0,2}、frequency {99.999MHz, 149.999MHz, 299.999MHz} を使用してイネーブルにします。
clk_out2 がデフォルトのクロックです。リンク設定でクロックが指定されていない場合、V++ リンカーはこのクロックを使用してカーネルを接続します。
[Proc Sys Reset] プロパティは、このクロックに割り当てられた同期リセット信号に設定されます。
![[Vivado Platform Setup]: Clock](../../../_images/vivado_platform_setup_clock.png)
次は Tcl でこれに該当する設定です。
set_property PFM.CLOCK {clk_out1 {id "1" is_default "false" proc_sys_reset "proc_sys_reset_0" status "fixed"} clk_out2 {id "0" is_default "true" proc_sys_reset "/proc_sys_reset_1" status "fixed"} clk_out3 {id "2" is_default "false" proc_sys_reset "/proc_sys_reset_2" status "fixed"}} [get_bd_cells /clk_wizard_0]
[Interrupt] タブを確認します。
[Interrupt] タブでは、axi_intc_0 の intr ポートがオンです。
![[Vivado Platform Setup]: Interrupt](../../../_images/vivado_platform_setup_irq.png)
次は Tcl でこれに該当する設定です。
set_property PFM.IRQ {intr {id 0 range 32}} [get_bd_cells /axi_intc_0]
シミュレーション モデルの確認¶
Versal エクステンシブル プラットフォームの例では、各 IP の類似モデルが適切に設定されています。このセッションでは、その設定を確認します。ブロック デザインをご自身で作成した場合は、プラットフォームでエミュレーションを実行する前に、これらの設定が適用されていることを確認してください。
ブロック デザインのブロックの中には、複数タイプのシミュレーション モデルを含むものもあります。Vitis エミュレーションでは、SystemC TLM (トランザクション レベルのモデリング) モデルが使用可能な場合、これらのブロックを使用する必要があります。TLM は、Vivado 2020.2 の CIPS、NOC、および AI エンジンのデフォルトのシミュレーション モデルです。ハードウェアをエクスポートする前に、これらが正しいかどうかを確認してください。
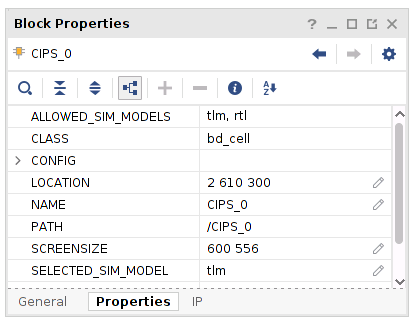
CIPS シミュレーション モデルの設定を確認します。
Vivado GUI で、CIPS インスタンスを選択します。
[Block Properties] ウィンドウを確認します。
[Properties] タブには、ALLOWED_SIM_MODELS が
tlm,rtl、SELECTED_SIM_MODEL がtlmと表示されます。つまり、このブロックでは 2 つのタイプのシミュレーション モデルがサポートされます。このチュートリアルでは、tlmモデルを使用するように選択しました。
ブロック図で NOC および AI エンジンのシミュレーション モデル プロパティを確認します。
ハードウェア XSA のエクスポート¶
ブロック図を生成します。
Flow Navigator で [Generate Block Diagram] をクリックします。
[Synthesis Options] を [Global] にして、生成時間を短縮します。
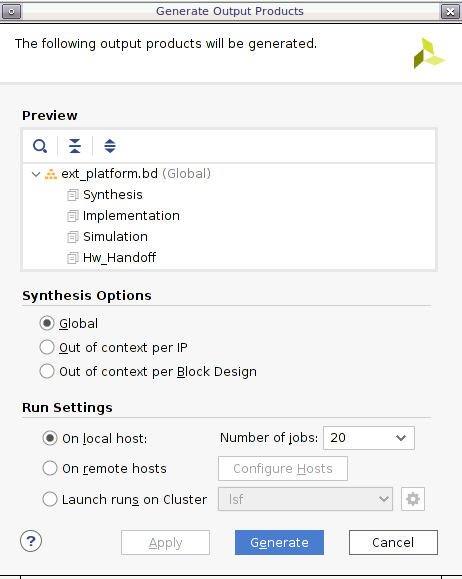
[Generate] ボタンをクリックします。
注記: 合成のデフォルト オプションの [Out of context per IP] を使用すると、ブロック図の各 IP が合成されます。合成前の XSA は次の手順で使用するので、これらの IP を合成する必要はありません。
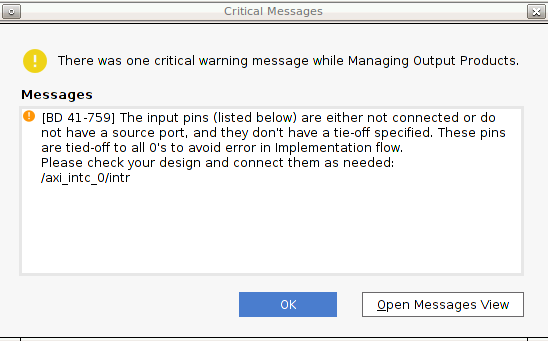
注記: このクリティカル警告は無視しても問題ありません。今後、この信号は Vitis で接続されるようになる予定です。
次のスクリプトを使用してプラットフォームをエクスポートします。
[File] → [Export] → [Export Platform] をクリックします。これには、Flow Navigator で [IP Integrator] → [Export Platform]、または [Platform Setup] タブの下部にある [Export Platform] ボタンを使用することもできます。
[Export Hardware Platform] ページで [Next] をクリックします。
Vivado デザインにはシミュレーション不可能な IP がないので、[Hardware and Hardware Emulation] を選択します。[Next] をクリックします。
DFX プラットフォームを作成するわけではないので、[Pre-synthesis] を選択します。[Next] をクリックします。
[Input Name] に VCK190_Custom_Platform と入力して [Next] をクリックします。
ファイル名を vck190_custom にアップデートし、[Next] をクリックします。
サマリを確認します。[Finish] をクリックします。
エクスポートは、次のコマンドでも実行できます。
# Setting platform properties set_property pfm_name {xilinx:vck190_es:VCK190_Custom_Platform:0.0} [get_files -norecurse *.bd] # Platform properties are set by Platform Setup GUI. If you haven't used Platform Setup GUI, please setup these properties manually. set_property platform.default_output_type "sd_card" [current_project] set_property platform.design_intent.embedded "true" [current_project] set_property platform.design_intent.server_managed "false" [current_project] set_property platform.design_intent.external_host "false" [current_project] set_property platform.design_intent.datacenter "false" [current_project] # Export Expandable XSA with PDI write_hw_platform -force ./vck190_custom.xsa
ハードウェア プラットフォームの作成フローが終了しました。手順 2: ソフトウェア プラットフォームの作成に進みます。
参考資料¶
AR#72033: Vivado 環境にボードやデザイン例を追加する方法
Copyright© 2020 Xilinx
この資料は 2021 年 2 月 8 日時点の表記バージョンの英語版を翻訳したもので、内容に相違が生じる場合には原文を優先します。資料によっては英語版の更新に対応していないものがあります。 日本語版は参考用としてご使用の上、最新情報につきましては、必ず最新英語版をご参照ください。