2020.2 Vitis™ Application Acceleration TutorialsSee 2020.1 Tutorials |
3. Using Optimization Techniques¶
This lab discusses various optimization techniques that you can use to reconcile any performance concerns with regard to your design.
Configure the Pipeline Loops Threshold¶
In the Explorer view, right-click the project solution, or
solution1, and select Solution Settings. This opens the Solution Settings dialog box.Select the General setting, and expand the config_compile setting as shown in the following figure.
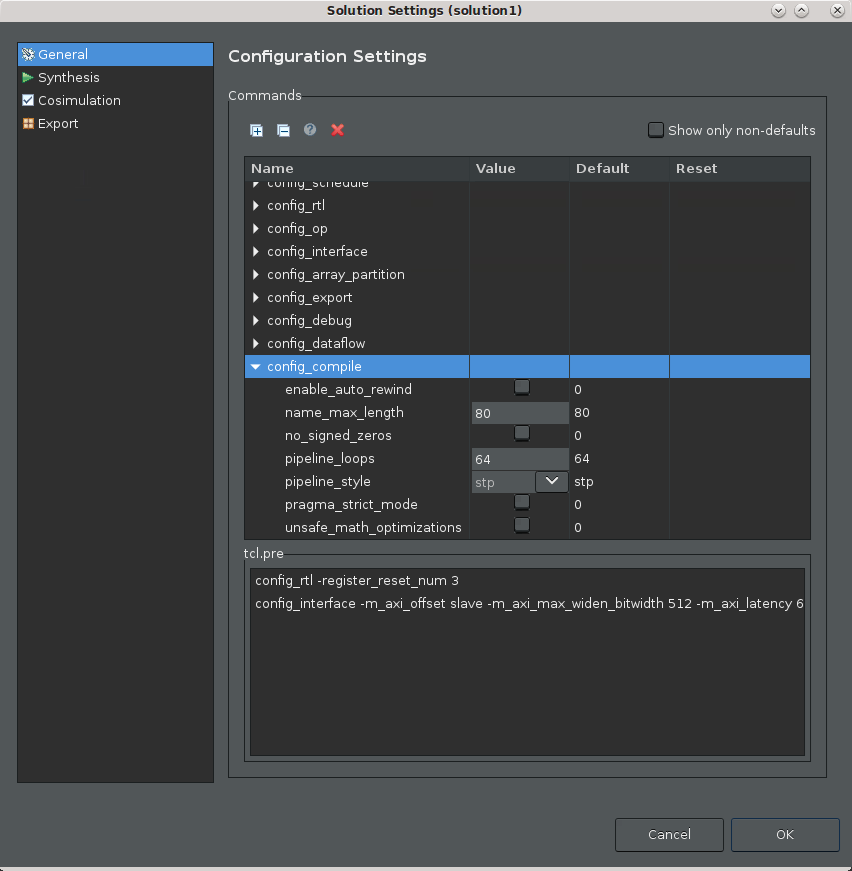
In the Configuration Settings dialog box edit
pipeline_loopsto specify6. This indicates that the tool should automatically unroll inner loops with six or fewer iterations. The default setting is 64.Click OK to add the
config_compilecommand to limit the automatic loop pipelining as specified.From the toolbar, click C Synthesis to rerun the synthesis command and display the results.
This configuration might be an acceptable response to II violations when the loops are not in the critical path of the design, or they represent a small problem relative to some larger problems that must be resolved. In other words, not all violations need to be resolved, and in some cases, not all violations can be resolved. They are simply artifacts of performance.
Configure the Pipeline Initiation Interval¶
ACTION: Back out the change before proceeding, right-click on the solution. Select Solution Settings command, and reset the
config_compile pipeline_loopcommand to its default value.
Another possible optimization is to tell the tool that a specific number of clock cycles before processing another sample is acceptable, for example of two or four clock cycles. This eliminates II violations because the latency would then match your specification. The overall latency of an application indicates that perhaps II=4 for some loops is not really a problem.
In the last section, the config_compile command is a tool configuration command that affects the compilation of the whole design. This optimization uses a code directive applied to a specific portion of the source code rather than to the tool itself.
Open the Source Code Editor for the function.
This can be done from the Explorer view by expanding the
Sourcefolder for the project, and double-clicking on thedct.cppfile to open it.With the Source Code Editor open, the right hand of the IDE also displays the Outline and Directive views for your code.
Outline view: Displays an outline of the displayed source code file. Select a region or function for quick navigation of the code.
Directives view: Select operations or elements of your code to assign
HLS pragmasto your source code, or to assignset_directivecommands to a Tcl script that is associated with the active solution. For more information, refer to Adding Pragmas and Directives in the Vitis HLS FLow of the Vitis Unified Software Platform Documentation (UG1416).
In the Directives view, right-click the
dct_2dfunction, and select Insert Directive.The Vitis HLS Directive Editor is displayed.
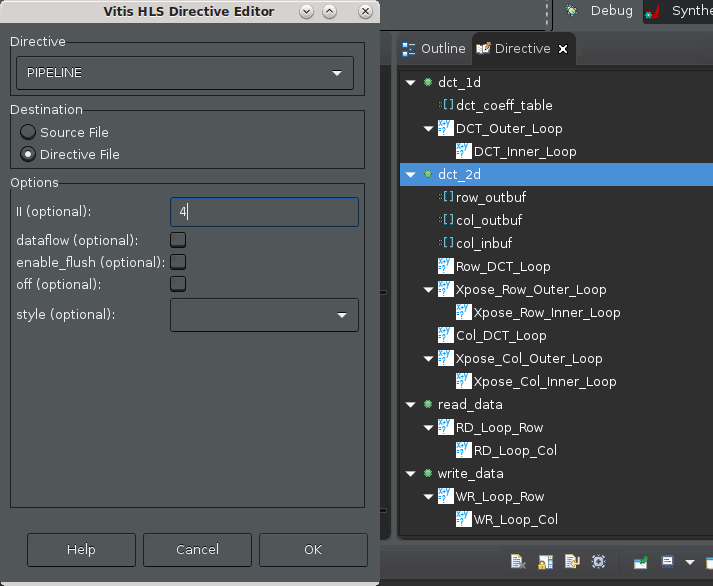
For Directive, select the PIPELINE directive.
For Destination, select Directive File. This is the default.
Directives let you create different solutions, with different directive files to optimize performance in different ways, and find the best solution. With HLS pragmas added directly into the source file, all solutions have the same optimizations.
TIP: Late in your design process it is worth moving settled optimizations from the directive file to HLS pragmas in your C/C++ code, so the optimizations become part of your code. You will do this later in this tutorial.
In the II field, enter
4. This defines an acceptable level of performance, and can eliminate II violations.Click OK to apply the directive. The
HLS PIPELINE II=4is added to the Directive view.Click C Synthesis to rerun synthesis.
Notice the Interval column for the
dct_2dfunction reads 4, but it is not reported as a problem.
Assign Dual-Port RAMs with BIND_STORAGE¶
ACTION: Back out the change before proceeding. Select the source code tab to make it active and display the Directive view. Right-click HLS PIPELINE II=4 and select Remove Directive.
In some designs, a Guidance message Unable to schedule load operation... indicates a load/load (or read/read conflict) issue with memory transactions. In these cases rather than accepting the latency, you could try to optimize the implementation to achieve the best performance (II=1).
The specific problem of reading or writing to memory can possibly be addressed by increasing the available memory ports to read from, or to write to. One approach is to use the BIND_STORAGE pragma or directive to specify the type of device resource to use in implementing the storage. BIND_STORAGE defines a specific device resource for use in implementing a storage structure associated with a variable in the RTL. For more information, refer to BIND_STORAGE in the Vitis HLS Flow of the Vitis Unified Software Platform Documentation (UG1416).
Select the dct.cpp tab to make the Code Editor active.
In the Directives view, right-click on the
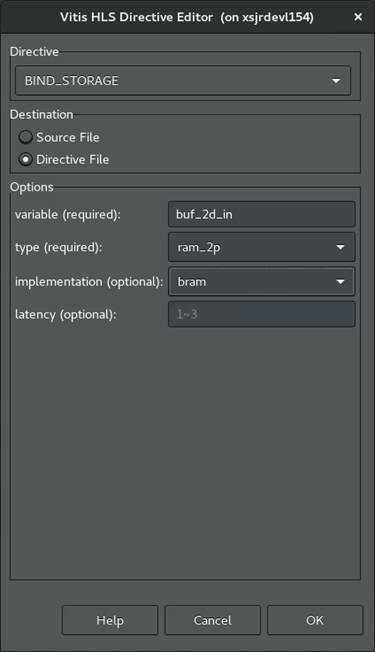
col_inbufvariable in thedct_2dfunction, and select Add Directive.This displays the Vitis HLS Directive Editor.
For Directive, select BIND_STORAGE.
For Destination, select Directive File.
In Options, the variable you selected is listed. Specify the type of memory to use for the variable as dual-port RAM,
ram_2p, and specify the implementation asbram.You can optionally specify the latency, but leave it blank for now.
Click OK.
Repeat the process for the the
buf_2d_outvariable of the top-leveldctfunction.In the Directive view, select the
buf_2d_outvariable and add the BIND_STORAGE pragma to specify the dual-port RAMram_2p, and implementationbram.
Click Run C Synthesis to rerun synthesis to see the results.
Assign an Array Partition¶
ACTION: Back out the change before proceeding. Select the Source Code tab to make it active and display the Directive view. Right-click on HLS BIND_STORAGE pragmas and select Remove Directive.
Another approach to solve memory port conflicts is to use the ARRAY_PARTITION directive to reconfigure the structure of an array. ARRAY_PARTITION lets you partition an array into smaller arrays or into individual registers instead of one large array. This effectively either increases the amount of read and write ports for the storage and potentially improves the throughput of the design.
However, ARRAY_PARTITION also requires more memory instances or registers, and so increases area and resource consumption. For more information, refer to ARRAY_PARTITION in the Vitis HLS Flow of the Vitis Unified Software Platform Documentation (UG1416). If partitioning large arrays, this can also increase the compile time.
In the Directives view, select the array variables, col_inbuf and buf_2d_out from the associated II violations.
Right-click and select Add Directive.
This opens the Vitis HLS Directive Editor as shown in the following figure.
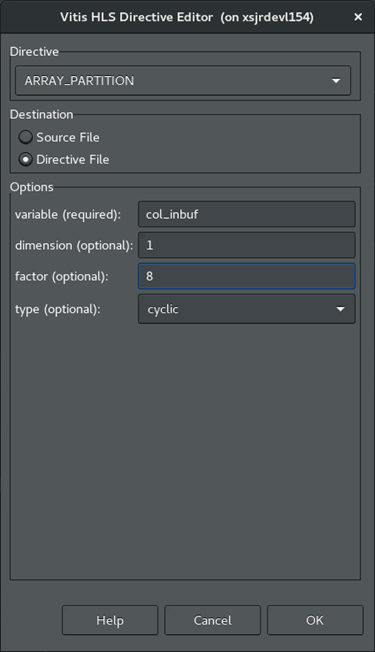
In the Vitis HLS Directive Editor, make the following selections:
For Directive, select ARRAY_PARTITION.
For Destination, select Directive File.
In Options, the variable you previously selected should be listed. 1.Leave the dimension set to 1, the default value.
Specify a factor of 8.
Select cyclic for the type.
Click OK to close the form, and apply the directive.
Repeat the steps above for the
buf_2d_outvariable.Click C Synthesis to rerun the synthesis to see the results.
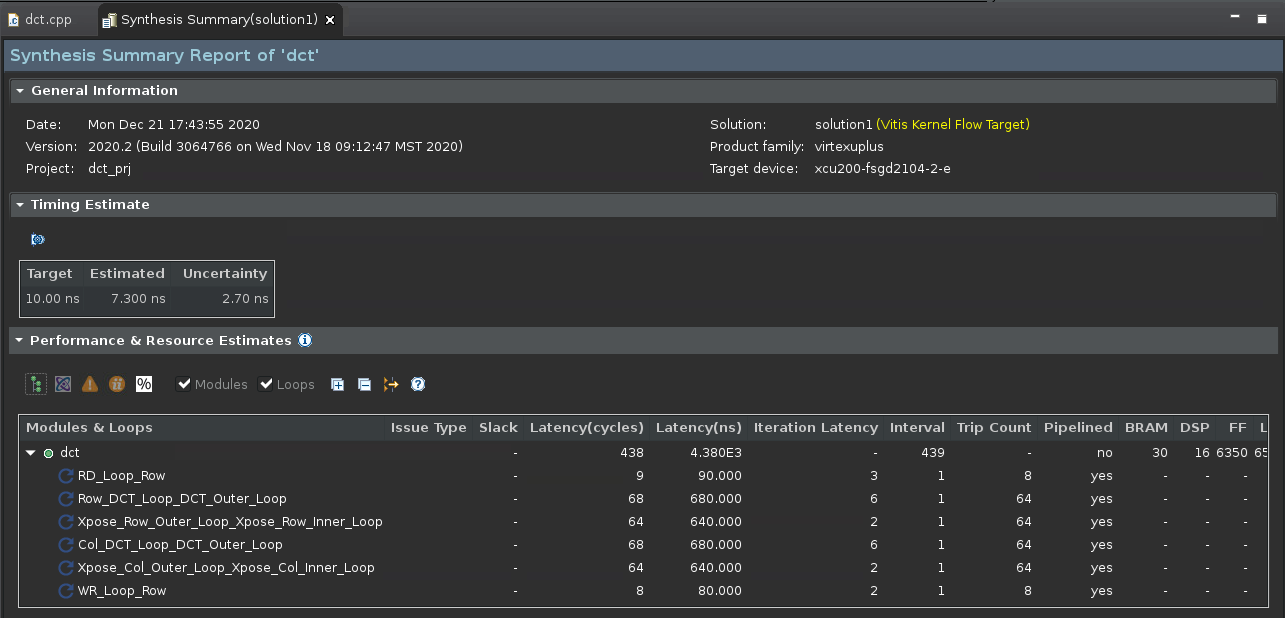
Re-examine the Synthesis Summary report to see the details of your synthesized design.
The reason for choosing a cyclic partition with a factor of 8 has to do with the code structures involved. The loop is processing an 8x8 matrix, which requires taking eight passes through the outer loop, and eight passes through the inner loop. By selecting a cyclic array partition, with a factor of 8, you are creating eight separate arrays that each get read one time per iteration. This eliminates any contention for accessing the memory during the pipeline of the loop.
Next Step¶
Now that you have examined different optimizations for different issues in the design, there is one more optimization to explore: the DATAFLOW optimization.
Return to Main Page — Return to Start of Tutorial
Copyright© 2021 Xilinx