Perception Stack Application¶
Design Overview¶
Introduction¶
The ROS 2 Perception Node accelerated application implements a subset of image_pipeline, which is one of the most popular packages in the ROS 2 ecosystem and a core piece of the ROS perception stack. It creates a simple computational graph consisting of two hardware accelerated nodes, resize & rectify as shown in the following figure.
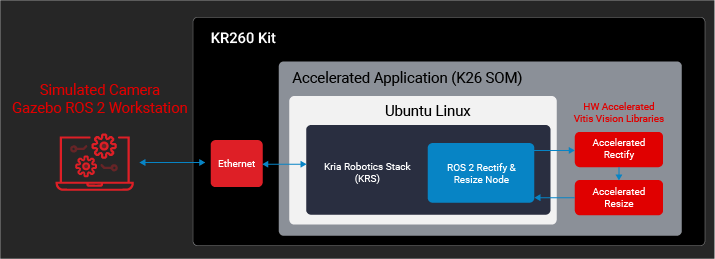
This application is based on KRS(Kria Robotics Framework) and it demonstrates the capabilities of KRS on how a roboticits can leverage programmable logic to accelerate their applications efficiently without having deeper hardware knowledge. This simple application is implemented to give users a quick hands on with KRS framework and get roboticists started to write their hardware accelerated applications on Kria Robotics starter kit easily.
Here, we have used Gazebo, which is industry’s leading Simulator with a pre-selected camera module to feed image data into the computational graph. Though the application supports ros2 capable cameras also but it is completely optional. The image is first rectified and then resized. The output “/resize” topic data can be seen using “rqt”. KRS also provides a tracing feature using LTTNG framework, which is an industry standard and can be used to trace and analyze the performance of Linux systems and applications.
Features¶
Allows appreciation of accelerate image_pipeline ROS metapackage image_proc (package)
Accelerates ROS 2 ResizeNode (part of image_proc)
Accelerates ROS 2 RectifyNode (part of image_proc)
Comes with one pre-selected camera module in Gazebo
Shows how to instrument ROS 2 with LTTNG to measure performance before and after acceleration
Shows how the Accelerated Vitis Vision Library functions in actions
Complete application with hardware design
Next Steps¶
Setting up the board and application deployment