Kria™ KR260 Robotics Starter Kit |
Machine Vision Camera Tutorial |
Debug¶
First review the FAQ for commonly encountered issues across AMD Kria™ SOM applications.
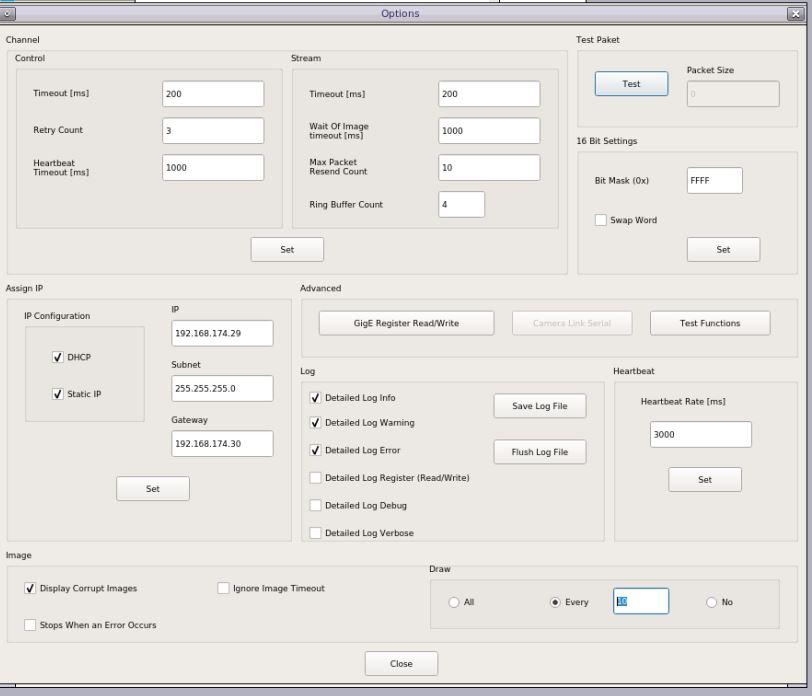
To get the maximum fps in the sphinx GEV viewer, you can change the draw value in sphinx –> options based on the host type (windows or ubuntu)
On ubuntu host
For 60 fps, set the draw value to
10.For 120 fps, set the draw value to
50.On windows host
For 60/120 fps, set the draw value to
10.
To cross check the connection between KR260 target and host, use ping functionality. For Example:
ping -I <10G_interface_name> <ip address>
To identify whether NIC card is inserted properly or not in ubuntu host machine PCIe slot, run this command:
lspci -vvv | grep -i "82599 10 Gigabit Network"
After inserting the 10G NIC card in windows host machine PCIe slot, check device manager for device detection and driver installation. If the driver is not installed for this device, install the driver from the given link: NIC Card driver.
If you get -1 for
xmutil loadapp <app name>, try to unload the existing app firmware usingxmutil unloadappand then load the preferred app firmware.To trigger the sensor stream-on, run the Gstreamer capture pipeline in the background using gst-launch-1.0 utility before starting the 10GigE application.
To install the mv-camera firmware manually, use the following command.
apt install xlnx-firmware-kr260-mv-camera-mono // mono variant apt install xlnx-firmware-kr260-mv-camera-color // color variant
Note: Ensure to run the apt update to get the latest firmware.
Make sure to use the following command:
sudo xmutil loadapp kr260-mv-camera-mono // mono variant sudo xmutil loadapp kr260-mv-camera-color // color variant
to load the mv-defect-detect firmware properly. Otherwise, necessary drivers are not loaded. There might be some errors that popup when you run the mv-defect-detect application.
Always unload existing firmware before loading the mv-defect-detect firmware.
The Framerate displayed is only for Live Playback. To get the framerate on console, prepend the GStreamer application as follows:
GST_DEBUG="*defect*:4" mv-defect-detect
Gst-launch Examples for Live Input and Raw Output¶
Live In - Live Out - Mono
gst-launch-1.0 v4l2src device=/dev/video0 io-mode=5 ! video/x-raw, width=1920, height=1080, format=GRAY8, framerate=60/1 ! perf ! kmssink bus-id=fd4a0000.display fullscreen-overlay=true -v
Live In - Live Out - Color
gst-launch-1.0 v4l2src device=/dev/video0 io-mode=5 ! video/x-raw, width=1920, height=1080, format=RGB, framerate=60/1 ! perf ! kmssink bus-id=fd4a0000.display fullscreen-overlay=true -v
Live In - File Out - Mono
gst-launch-1.0 v4l2src device=/dev/video0 ! video/x-raw, width=1920, height=1080, format=GRAY8, framerate=60/1 ! perf ! filesink location=out.y8 -v
Live In - File Out - Color
gst-launch-1.0 v4l2src device=/dev/video0 ! video/x-raw, width=1920, height=1080, format=RGB, framerate=60/1 ! perf ! filesink location=out.rgb -v
Gst-launch Examples for Live Input and Pre-process Output¶
Live In - Live Out - Mono
gst-launch-1.0 v4l2src device=/dev/video0 io-mode=4 ! video/x-raw, width=1920, height=1080, format=GRAY8, framerate=60/1 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/mono/otsu-accelarator.json ! queue ! video/x-raw, width=1920, height=1080, format=GRAY8 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/mono/preprocess-accelarator-stride.json ! video/x-raw, width=1920, height=1080, format=GRAY8 ! perf ! kmssink bus-id=fd4a0000.display fullscreen-overlay=true -v
Live In - File Out - Color
gst-launch-1.0 v4l2src device=/dev/video0 io-mode=4 ! video/x-raw, width=1920, height=1080, format=GRAY8, framerate=60/1 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/color/otsu-accelarator.json ! queue ! video/x-raw, width=1920, height=1080, format=GRAY8 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/color/preprocess-accelarator.json ! video/x-raw, width=1920, height=1080, format=GRAY8 ! perf ! filesink location=out.rgb -v
Gst-launch Examples for Live Input and CCA with Text Overlay Output¶
Live In - Live Out - Color
gst-launch-1.0 v4l2src device=/dev/video0 io-mode=4 ! video/x-raw, width=1920, height=1080, format=GRAY8, framerate=60/1 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/color/otsu-accelarator.json ! queue ! video/x-raw, width=1920, height=1080, format=GRAY8 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/color/preprocess-accelarator.json ! queue ! video/x-raw, width=1920, height=1080, format=NV16 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/color/cca-accelarator-stride.json ! queue ! video/x-raw, width=1920, height=1080, format=GRAY8 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/color/text2overlay.json ! video/x-raw, width=1920, height=1080, format=GRAY8 ! perf ! kmssink bus-id=fd4a0000.display fullscreen-overlay=true sync=false -v
Live In - File Out - Mono
gst-launch-1.0 v4l2src device=/dev/video0 io-mode=4 ! video/x-raw, width=1920, height=1080, format=GRAY8, framerate=60/1 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/mono/otsu-accelarator.json ! queue ! video/x-raw, width=1920, height=1080, format=GRAY8 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/mono/preprocess-accelarator.json ! queue ! video/x-raw, width=1920, height=1080, format=NV16 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/mono/cca-accelarator.json ! queue ! video/x-raw, width=1920, height=1080, format=GRAY8 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/mono/text2overlay.json ! video/x-raw, width=1920, height=1080, format=GRAY8 ! perf ! filesink location=out.y8 -v
Gst-launch Examples for File Input and Raw Output¶
File In - Live Out - Mono
gst-launch-1.0 filesrc location=./input.y8 blocksize=2073600 ! rawvideoparse use-sink-caps=false width=1920 height=1080 format=gray8 framerate=2/1 ! perf ! kmssink bus-id=fd4a0000.display fullscreen-overlay=true sync=true -v
File In - File Out - Color
gst-launch-1.0 filesrc location=./input.rgb blocksize=6220800 ! rawvideoparse use-sink-caps=false width=1920 height=1080 format=rgb framerate=2/1 ! perf ! filesink location=out.rgb -v
Gst-launch Examples for File Input and Pre-process Output¶
File In - Live Out - Color
gst-launch-1.0 filesrc location=./input.rgb blocksize=6220800 ! rawvideoparse use-sink-caps=false width=1920 height=1080 format=rgb framerate=2/1 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/color/otsu-accelarator.json ! queue ! video/x-raw, width=1920, height=1080, format=GRAY8 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/color/preprocess-accelarator-stride.json ! queue ! video/x-raw, width=1920, height=1080, format=GRAY8 ! perf ! kmssink bus-id=fd4a0000.display fullscreen-overlay=true sync=true -v
File In - File Out - Mono
gst-launch-1.0 filesrc location=./input.y8 blocksize=2073600 ! rawvideoparse use-sink-caps=false width=1920 height=1080 format=gray8 framerate=2/1 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/mono/otsu-accelarator.json ! queue ! video/x-raw, width=1920, height=1080, format=GRAY8 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/mono/preprocess-accelarator.json ! video/x-raw, width=1920, height=1080, format=GRAY8 ! perf ! filesink location=out.y8 -v
Gst-launch Examples for File Input and CCA with Text Overlay Output¶
File In - Live Out - Mono
gst-launch-1.0 filesrc location=./input.y8 blocksize=2073600 ! rawvideoparse use-sink-caps=false width=1920 height=1080 format=gray8 framerate=2/1 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/mono/otsu-accelarator.json ! queue ! video/x-raw, width=1920, height=1080, format=GRAY8 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/mono/preprocess-accelarator.json ! queue ! video/x-raw, width=1920, height=1080, format=NV16 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/mono/cca-accelarator-stride.json ! queue ! video/x-raw, width=1920, height=1080, format=GRAY8 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/mono/text2overlay.json ! video/x-raw, width=1920, height=1080, format=GRAY8 ! perf ! kmssink bus-id=fd4a0000.display fullscreen-overlay=true sync=true -v
File In - File Out - Color
gst-launch-1.0 filesrc location=./input.rgb blocksize=6220800 ! rawvideoparse use-sink-caps=false width=1920 height=1080 format=rgb framerate=2/1 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/color/otsu-accelarator.json ! queue ! video/x-raw, width=1920, height=1080, format=GRAY8 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/color/preprocess-accelarator.json ! queue ! video/x-raw, width=1920, height=1080, format=NV16 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/color/cca-accelarator.json ! queue ! video/x-raw, width=1920, height=1080, format=GRAY8 ! vvas_xfilter kernels-config=/opt/xilinx/xlnx-app-kr260-mv-defect-detect/share/vvas/color/text2overlay.json ! video/x-raw, width=1920, height=1080, format=GRAY8 ! perf ! filesink location=out.rgb -v
Next Steps¶
Go back to the MV Camera Application Deployment
Copyright © 2023–2024 Advanced Micro Devices, Inc.