スカラー型エンジンと適応型エンジンを使用したシステム デザイン例¶
この章では、使用可能なツールとサポートされているソフトウェア ブロックを使用して、Versal™ デバイスをベースにしたシステムを構築する方法を説明します。この章では、AMD Vivado™ Design Suite で PL AXI GPIO および PL AXI UART を使用してエンベデッド デザインを作成する方法について説明します。また、Versal デバイス上で Arm® Cortex™-A72 コア ベースの APU 用の Linux オペレーティング システムをコンフィギュレーションしてビルドする手順についても説明します。
この章では、PetaLinux ツールの使用例について説明します。
注記
この章のデザイン ファイルは、Vivado Design Suite 2022.1 で検証されています。
デザイン例: AXI GPIO の使用¶
Linux アプリケーションは、PL ベースの AXI GPIO インターフェイスを使用してボードの DIP スイッチを監視し、ボードの LED を制御します。LED アプリケーションは、VCK190 および VMK180 ボードで実行できます。
RPU アプリケーションは、PL ベースの AXI UART Lite を使用して、PS UART コンソールを使用する代わりに AXI UART コンソールにデバッグ メッセージを出力します。PL UART アプリケーションは、VCK190 および VMK180 ボードで実行できます。
ハードウェアの設定¶
最初の手順として、このデザインで PS セクションと PL セクションを設定します。これは、Vivado IP インテグレーターを使用して実行できます。まず Vivado IP カタログから必要な IP を追加し、PS サブシステムのブロックにコンポーネントを接続します。ハードウェアを設定する方法は、次のとおりです。
注記
Vivado Design Suite が既に開いている場合は、手順 3 へ進みます。
「Versal CIPS および NoC (DDR) IP コアの設定」で作成した Vivado プロジェクトを開きます。
C:/edt/edt_versal/edt_versal.xpr
Flow Navigator の [IP Integrator] → [Open Block Design] をクリックします。
ブロック図で右クリックし、[Add IP] をクリックします。
IP ブロックを接続して完全なシステムを作成¶
IP ブロックを接続してシステムを作成する手順は、次のとおりです。
Versal CIPS IP コアをダブルクリックします。
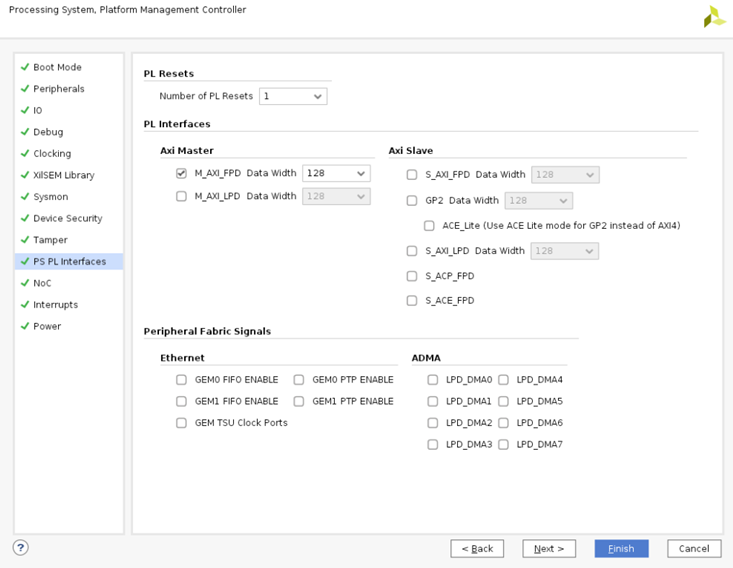
[PS-PMC] → [PS-PL Interfaces] をクリックします。
M_AXI_FPD インターフェイスをイネーブルにし、[Number of PL Resets] を 1 に設定します (図を参照)。
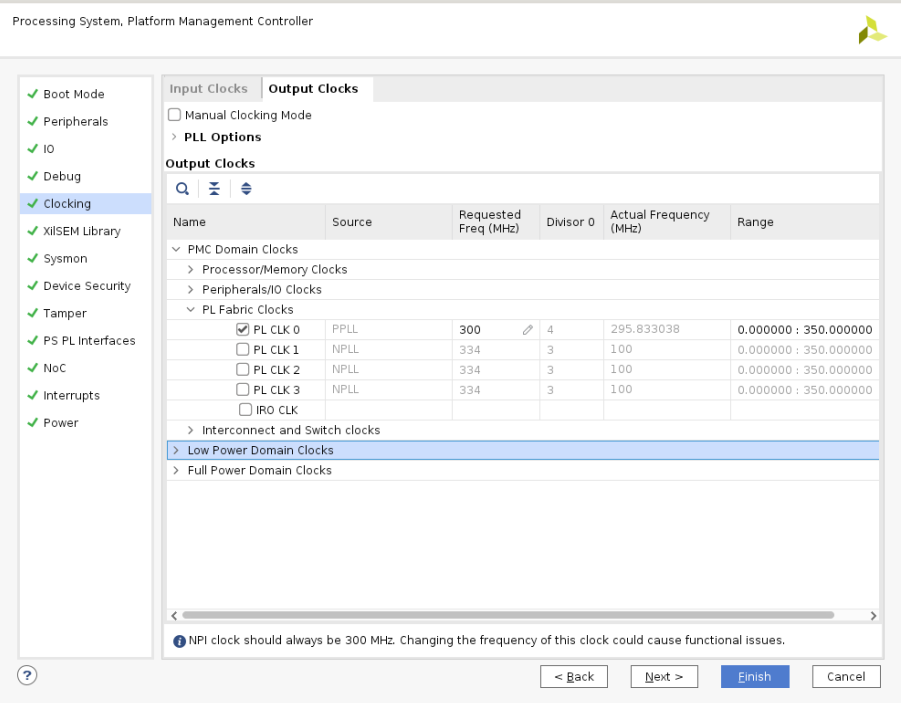
[Clocking] をクリックし、[Output Clocks] タブをクリックします。
[PMC Domain Clocks] を展開します。次に、[PL Fabric Clocks] を展開します。次の図のように、PL0_REF_CLK を 300 MHz に設定します。
[Finish] をクリックしてから、[OK] をクリックし、設定を完了し、ブロック図に戻ります。
IP アドレスの追加および設定¶
IP アドレスを追加および設定する手順は、次のとおりです。
ブロック図を右クリックし、[Add IP] をクリックして IP カタログから IP を追加します。
AXI GPIO を検索し、[AXI GPIO] をダブルクリックしてブロック図に追加します。
AXI GPIO IP の別のインスタンスをデザインに追加します。
IP カタログで AXI Uartlite を検索し、デザインに追加します。
[Block Design] ビューで [Run Connection Automation] をクリックします。

[Run Connection Automation] ダイアログ ボックスが開きます。
[Run Connection Automation] ダイアログ ボックスで、[All Automation] をオンにします。
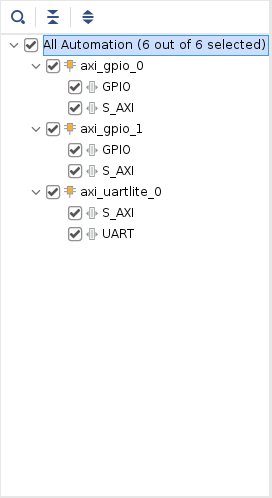
これにより、AXI GPIO IP のすべてのポートの自動化がチェックされます。
axi_gpio_0 の [GPIO] をクリックし、次に示すように [Select Board Part Interface] を [Custom] に設定します。

axi_gpio_0 の [S_AXI] をクリックします。次の図に示すように設定します。
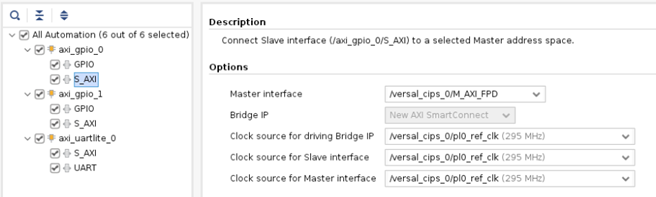
axi_gpio_1 に対して手順 7 および手順 8 を繰り返します。
axi_uartlite_0 の [S_AXI] をクリックします。次の図に示すように設定します。
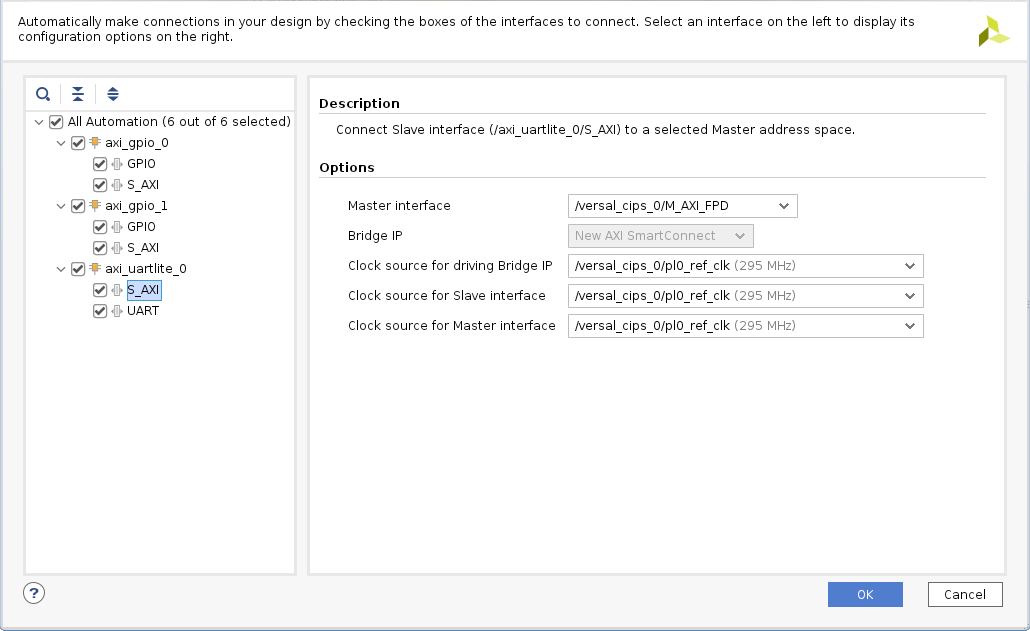
これにより、次の接続が設定されます。
SmartConnect を CIPS と AXI GPIO IP 間のブリッジ IP として使用して AXI_GPIO の S_AXI および AXI Uartlite と CIPS の M_AXI_FPD を接続します。
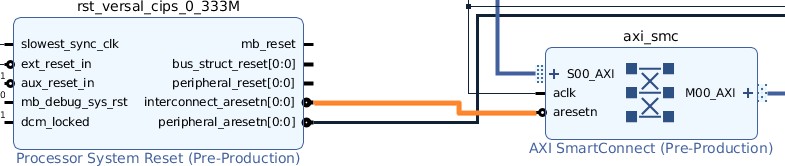
プロセッサ システム リセット IP をイネーブルにします。
pl0_ref_clk をプロセッサ システム リセット、AXI GPIO、および SmartConnect IP クロックに接続します。
SmartConnect および AXI GPIO のリセットをプロセッサ システム リセット IP の peripheral_aresetn に接続します。
axi_uartlite_0 の [UART] をクリックします。次の図に示すように設定します。
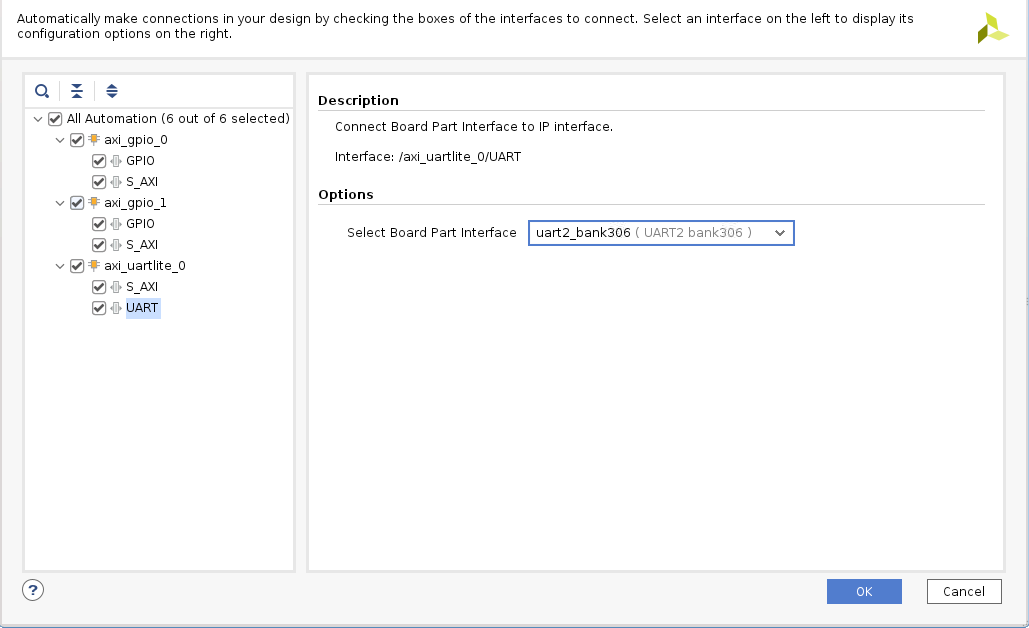
[OK] をクリックします。
[Block Design] ビューで [Run Connection Automation] をクリックし、[All Automation] チェック ボックスをオンにします。
ext_reset_in をクリックして、次のように設定します。
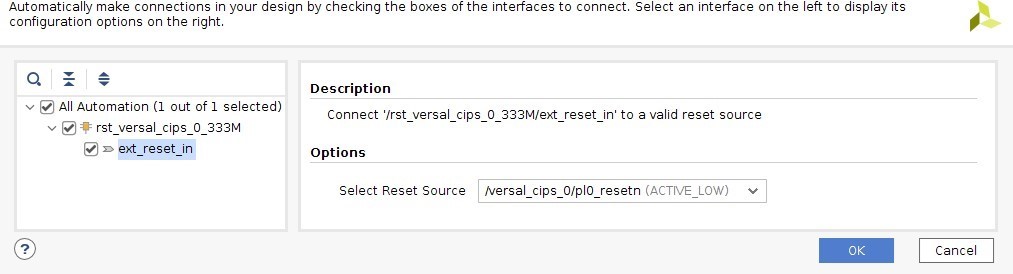
これにより、プロセッサ システム リセット IP の ext_reset_in が CIPS の pl_resetn に接続されます。
[OK] をクリックします。
プロセッサ システム リセット IP の peripheral_aresetn から SmartConnect IP の aresetn への接続を解除します。
SmartConnect IP の aresetn をプロセッサ システム リセット IP の interconnect_aresetn に接続します。
axi_gpio_0 IP をダブルクリックして開きます。
次の図のように [IP Configuration] タブを設定します。
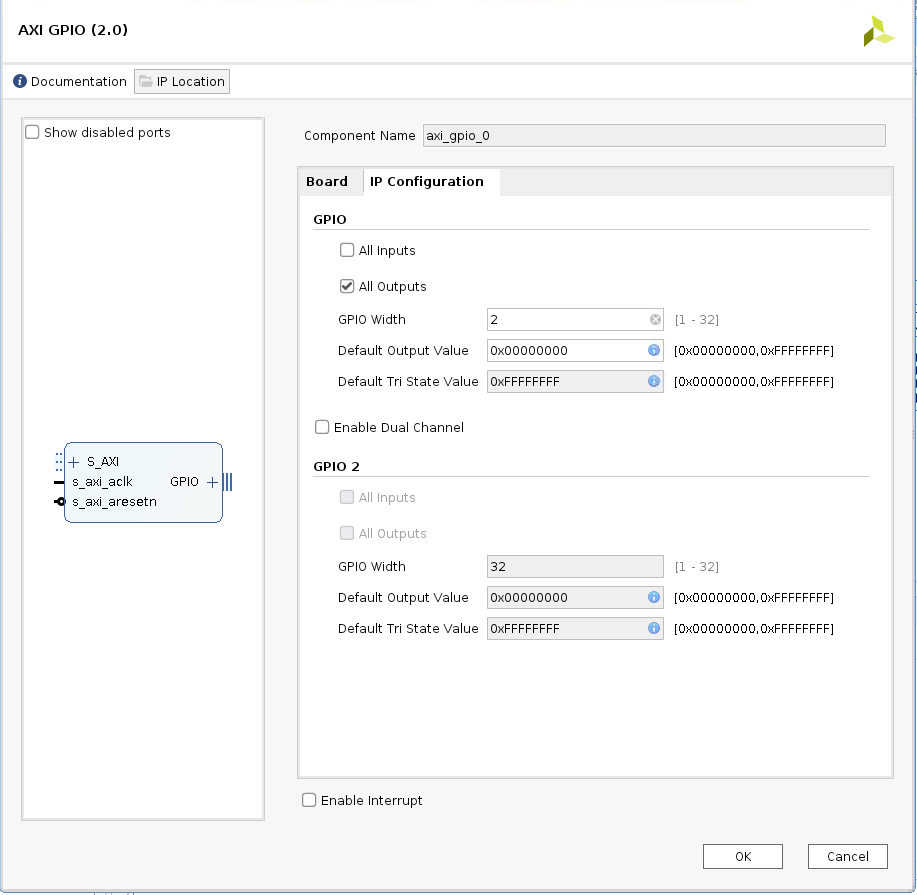
axi_gpio_1 も同じ設定にします。
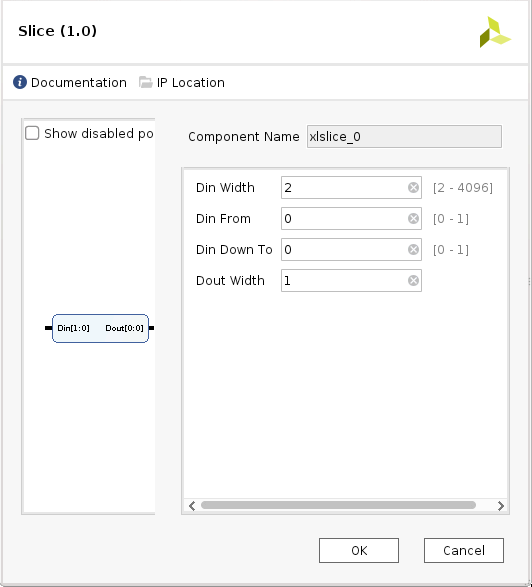
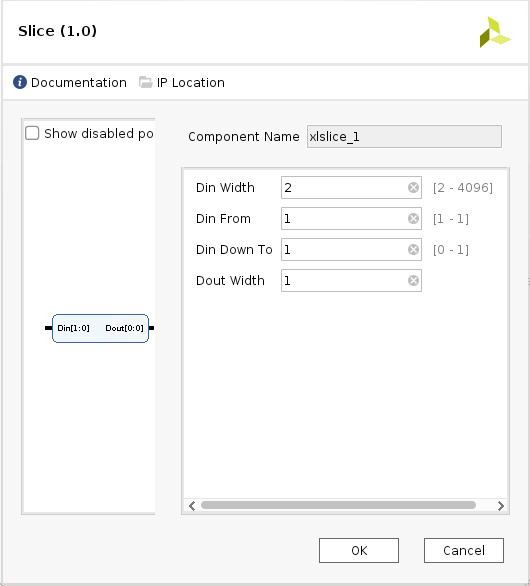
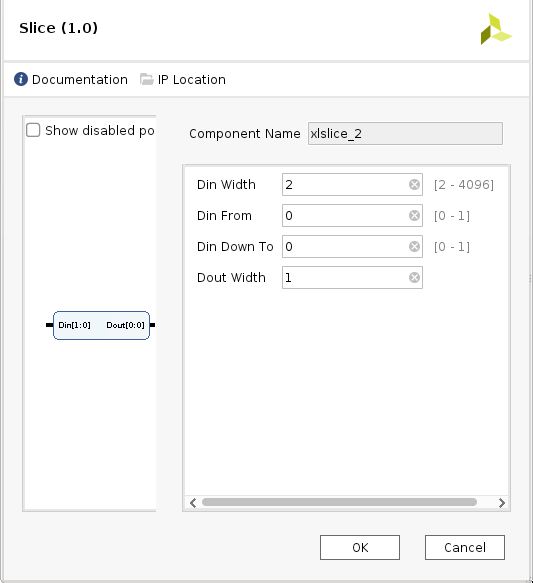
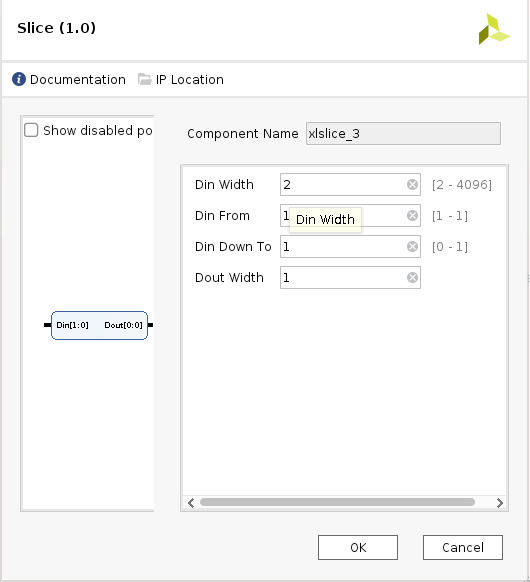
Slice IP のインスタンスをさらに 4 つ追加します。
AXI GPIO IP の外部ピンを削除し、インターフェイスを展開します。
axi_gpio_0 の出力ピン gpio_io_0 をスライス 0 およびスライス 1 に接続します。
同様に、axi_gpio_1 の出力ピン gpio_io_0 をスライス 2 およびスライス 3 に接続します。
Slice IP の出力を外部接続 (Make External) にします。
次のように各 Slice IP を設定します。
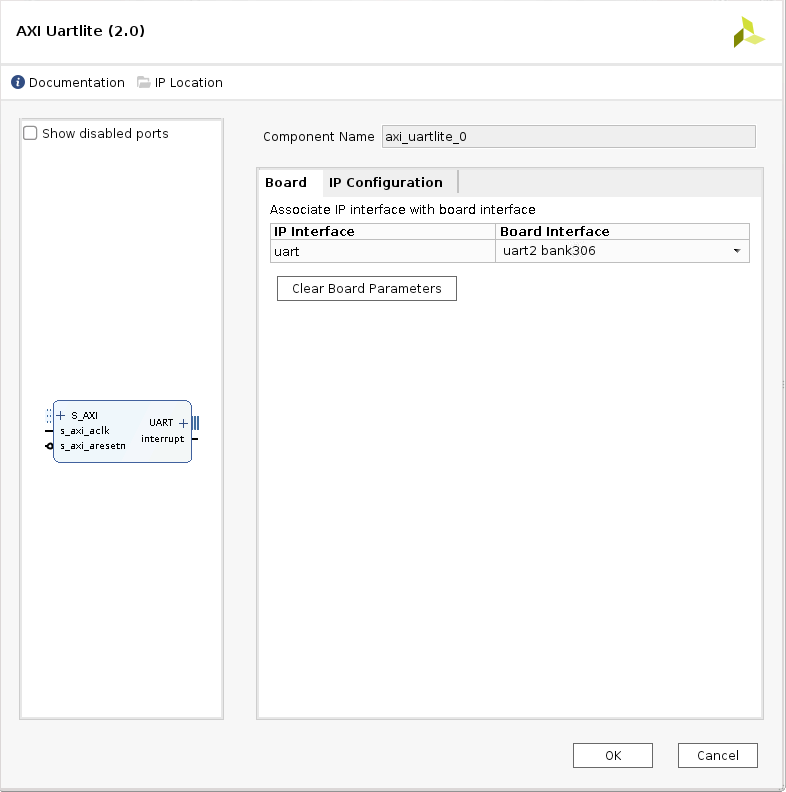
axi_uartlite_0 をダブルクリックして、IP を開きます。
[Board] タブで、次のようにボード インターフェイスを設定します。
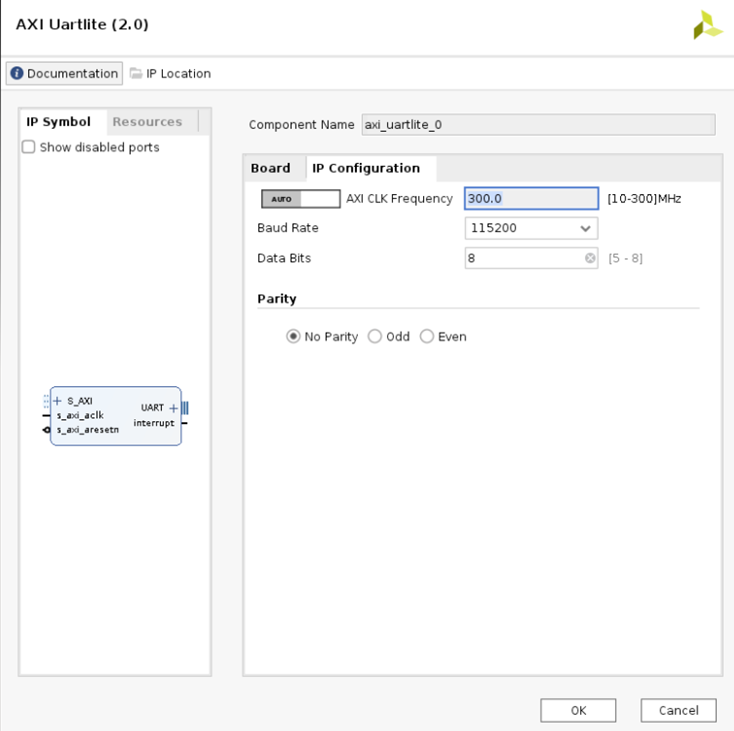
次の図のように [IP Configuration] タブを設定します。
Clock Wizard IP を追加します。これをダブルクリックして、IP を開きます。
[Clocking Features] タブに移動し、次のように設定します。
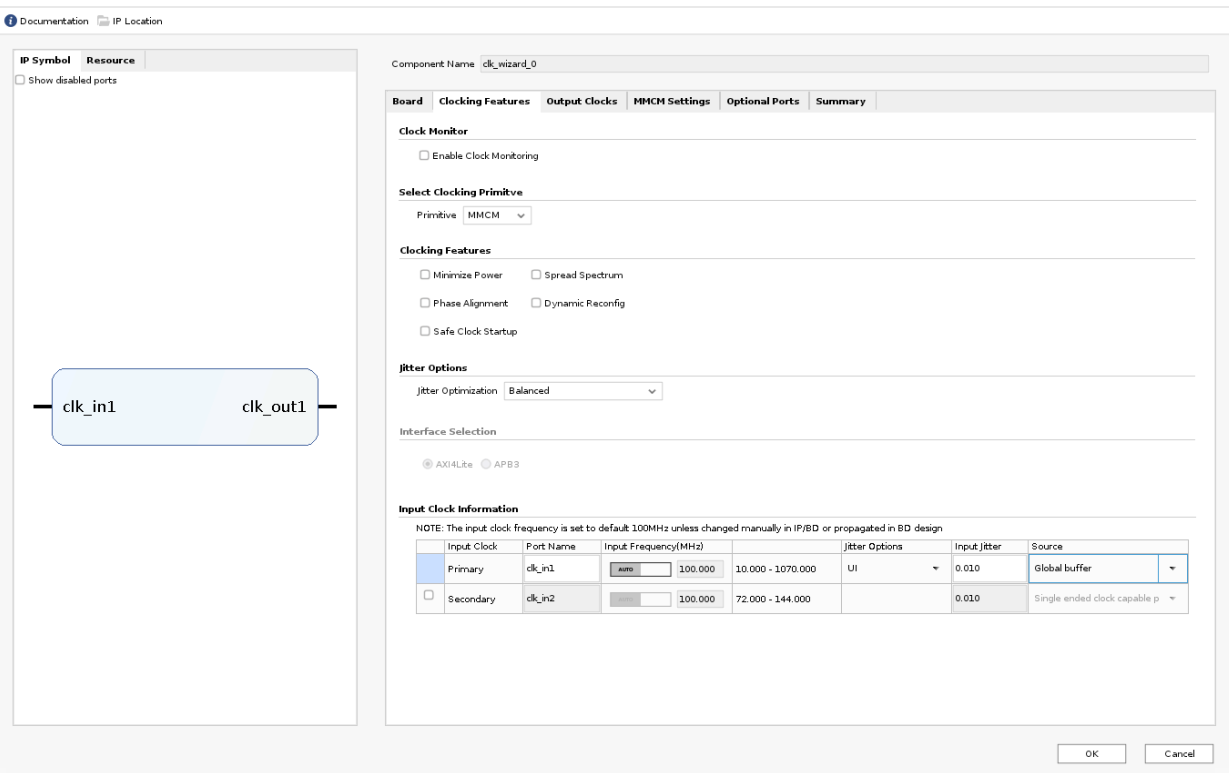
[Input Clock Information] の [Source] オプションが [Global buffer] に設定されていることを確認します。
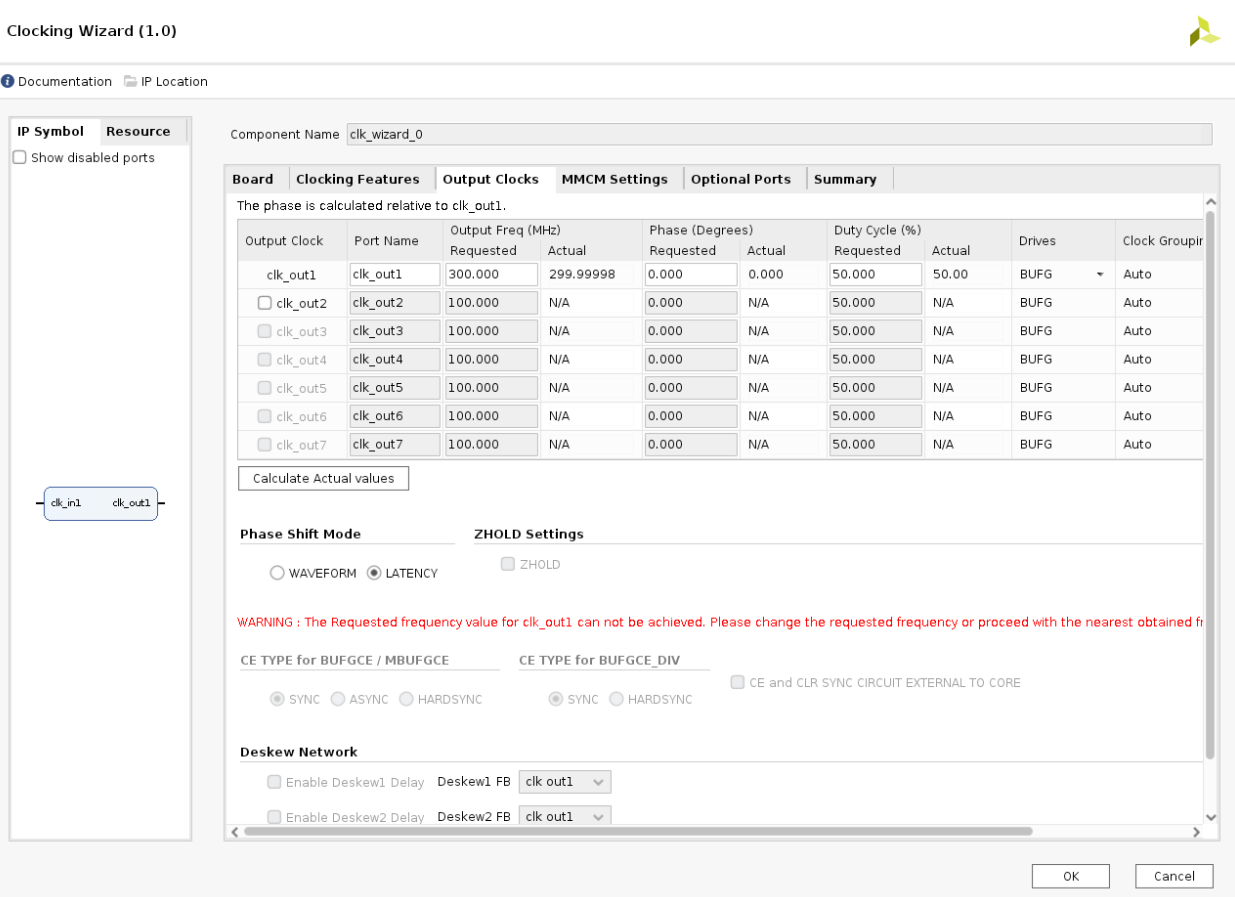
[Output Clocks] タブに移動し、次のように設定します。
CIPS の pl0_ref_clk を右クリックし、[Disconnect Pin] をクリックします。
CIPS からの pl0_ref_clk をクロッキング ウィザードの入力 clk_in1 に接続します。
クロッキング ウィザードの出力を Processor System Reset IP の slowest_sync_clock に接続します。
これはタイミング エラーを避けるのに役立ちます。
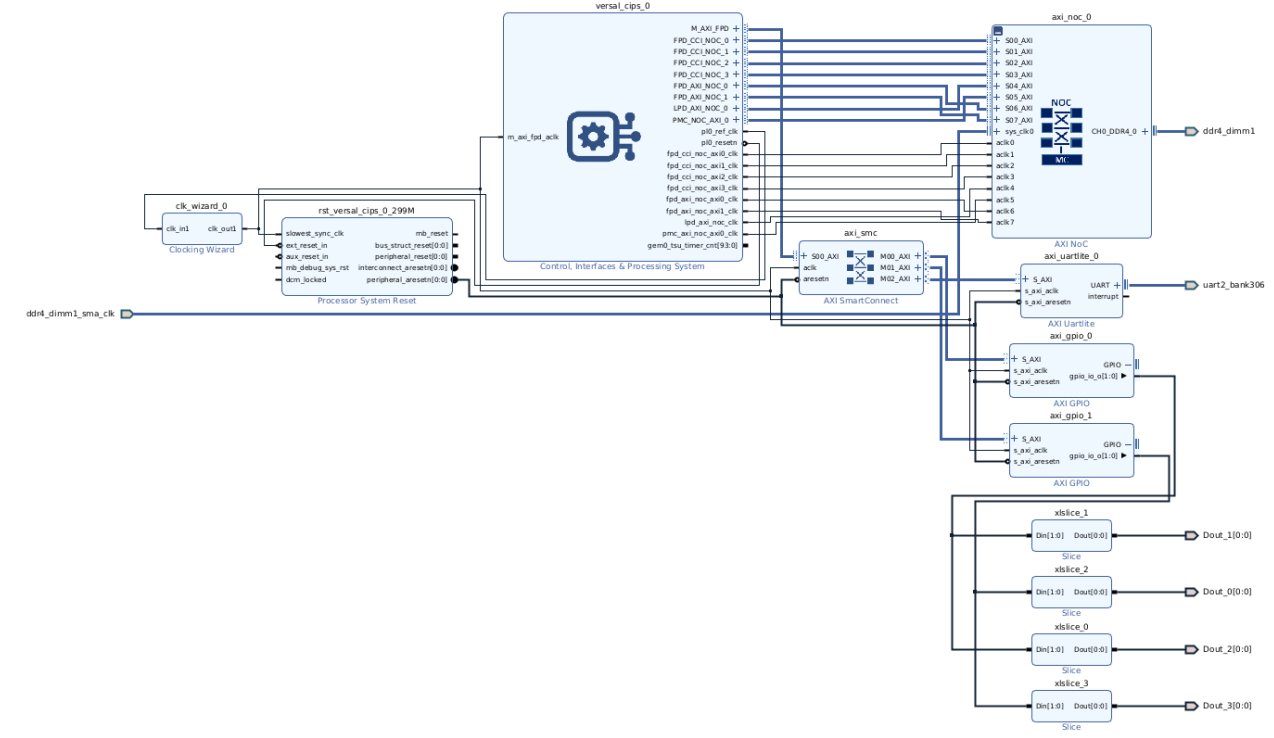
ブロック デザイン全体が次のようになります。
デザインの検証および出力の生成¶
デザインを検証し、出力ファイルを生成するには、次の手順を実行します。
[Block Design] ビューに戻り、ブロック デザインを保存します (Ctrl + S キーを押す)。
[Diagram] ウィンドウの空白部分を右クリックして、[Validate Design] をクリックします。または、F6 キーを押します。次の図のようなメッセージが表示されます。
Vivado ツールから、デザイン内の IP をアドレスにマッピングするように指示するプロンプトが表示されます。[Yes] をクリックします。

注記
アドレス セグメントの数は、デザイン内のメモリ マップド IP の数によって異なる場合があります。
検証が完了すると、次のようなメッセージ ダイアログ ボックスが開きます。

[OK] をクリックしてメッセージを閉じます。
[Sources] ウィンドウをクリックします。
制約を展開します。
[constrs_1] を右クリックし、[Add Sources] をクリックします。
[Add Sources] ウィンドウが表示されます。
[Add or Create Constraints] オプションを選択し、[Next] をクリックします。
追加する XDC ファイルを選択します。
注記
制約ファイルは pl_gpio_uart/constrs フォルダーにパッケージの一部として含まれます。
[Finish] をクリックします。
[Hierarchy] タブをクリックします。
[Sources] ウィンドウの [Design Sources] の下の [edt_versal_wrapper] を展開します。
edt_versal_i : edt_versal (edt_versal.bd) という最上位ブロックを右クリックし、[Generate Output Products] をクリックします。
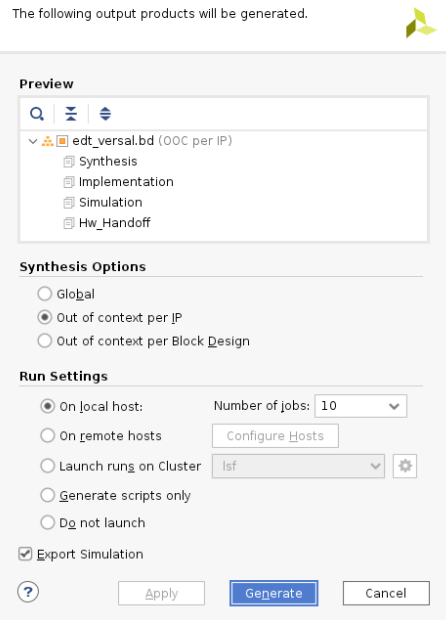
[Generate] をクリックします。
[Generate Output Products] の処理が完了したら、[OK] をクリックします。
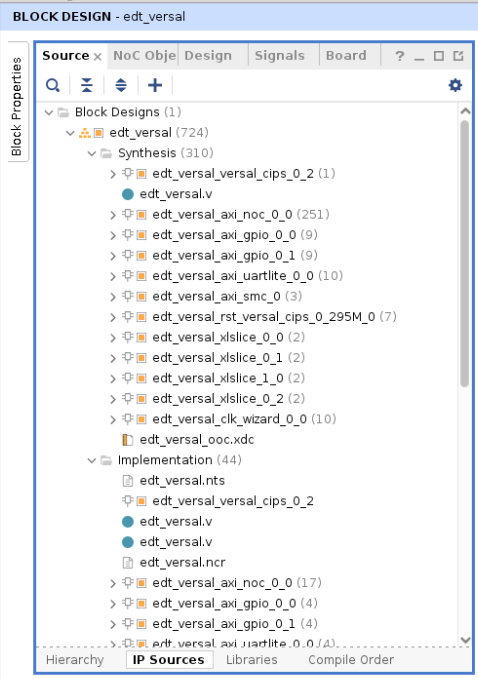
[Sources] ウィンドウで [IP Sources] ビューをクリックします。次の図に示すように、生成した出力ファイルが表示されます。
デバイス イメージの合成、インプリメント、生成¶
デザインのデバイス イメージを生成するには、次の手順を実行します。
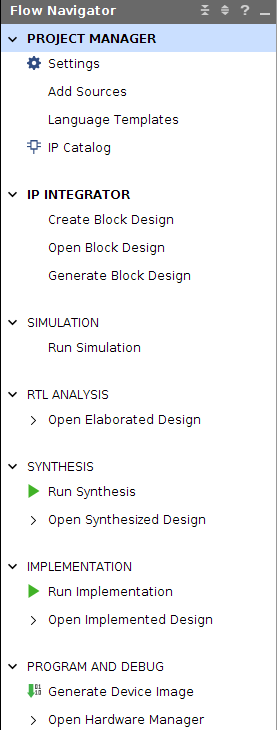
Flow Navigator の [Program and Debug] をクリックし、[Generate Device Image] をクリックし、[OK] をクリックします。
[No Implementation Results Available] メニューが表示されます。[Yes] をクリックします。
[Launch Run] メニューが表示されます。[OK] をクリックします。
デバイス イメージの生成が完了すると、[Device Image Generation Completed] ダイアログ ボックスが開きます。
[Cancel] をクリックしてウィンドウを閉じます。
デバイス イメージを生成したら、ハードウェアをエクスポートします。
注記
次の手順はオプションなので、省略して「ハードウェアのエクスポート」 セクションに進むこともできます。これらの手順を実行すると、デバイス イメージを生成する前に合成およびインプリメンテーションを実行するので、デバイス イメージ生成の詳細なフローがわかるようになります。デバイス イメージの生成フローを理解する必要がある場合は、次の手順を実行します。
Flow Navigator で [Synthesis] をクリックし、[Run Synthesis] をクリックします。
合成の開始前にプロジェクトを保存するようメッセージが表示された場合は、[Save] をクリックします。
合成の実行中、ウィンドウの右上にステータス バーが表示されます。このステータス バーは、デザイン プロセスをとおして、さまざまな理由により表示されます。ステータス バーは、プロセスがバックグランドで実行されていることを示します。合成が完了すると、[Synthesis Completed] ダイアログ ボックスが開きます。
[Run Implementation] をクリックして [OK] をクリックします。
インプリメンテーションが完了すると、[Implementation Completed] ダイアログ ボックスが開きます。
[Generate Device Image] をクリックして [OK] をクリックします。
デバイス イメージの生成が完了すると、[Device Image Generation Completed] ダイアログ ボックスが開きます。
[Cancel] をクリックしてウィンドウを閉じます。
デバイス イメージを生成したら、ハードウェアをエクスポートします。
ハードウェアのエクスポート¶
Vivado のメイン メニューから [File] → [Export] → [Export Hardware] をクリックします。[Export Hardware] ダイアログ ボックスが開きます。
[Include bitstream] を選択し、[Next] をクリックします。
エクスポートしたファイルの名前を入力し (またはデフォルトを使用し)、ディレクトリを選択します。[Next] をクリックします。
ハードウェア モジュールが既にエクスポートされている場合は、警告メッセージが表示されます。既存の XSA ファイルを上書きするかどうか尋ねるメッセージが表示されたら、[Yes] をクリックします。
[Finish] をクリックします。
サンプル プロジェクト: RPU を使用した FreeRTOS AXI UARTLiteアプリケーション プロジェクト¶
このセクションでは、Versal デバイス上で Arm Cortex-R5F コア ベースの RPU 用の FreeRTOS アプリケーションをコンフィギュレーションしてビルドする手順について説明します。
次の手順は、Arm Cortex-R5F から FreeRTOS アプリケーションを作成する手順を示しています:
AMD Vitis™ IDE を起動し、
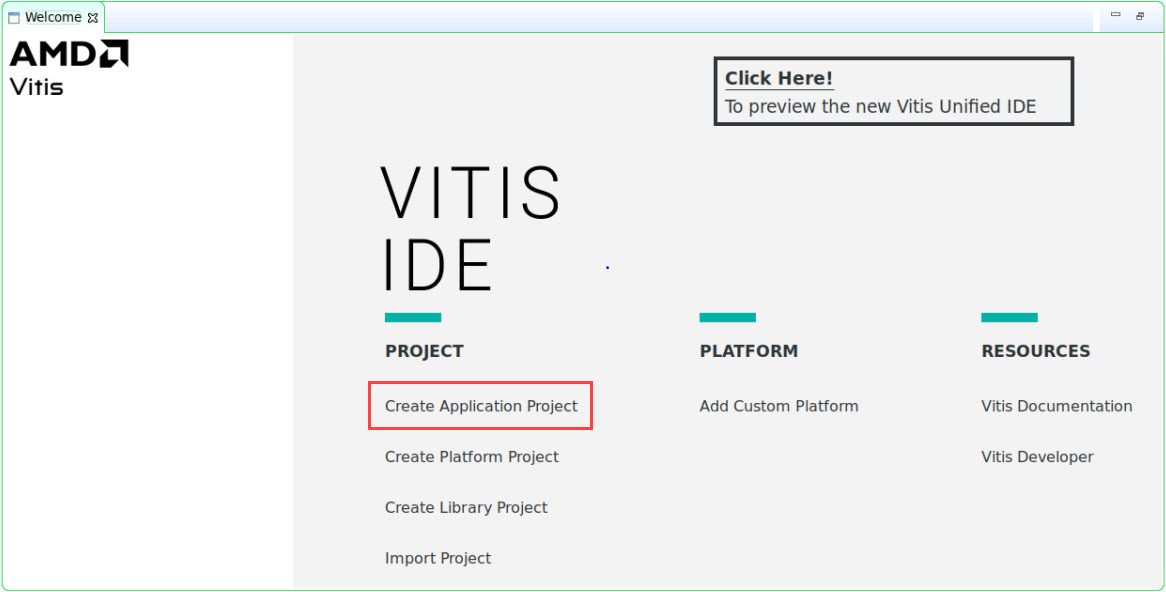
c:/edt/freertosなどの新しいワークスペースを作成します。[File] → [New] → [Application Project] をクリックします。[Create a New Application Project] ページが開きます。Vitis IDE を初めて起動した場合は、次の図に示す Welcome 画面で [Create Application Project] を選択できます。
注記
オプションで、[Skip welcome page next time] チェック ボックスをオンにすると、毎回 Welcome ページが表示されないようにすることもできます。
Vitis IDE には、ターゲット プラットフォーム、システム プロジェクト、ドメイン、テンプレートの 4 つのコンポーネントがあります。Vitis IDE で新しいアプリケーション プラットフォーム作成するには、次の手順に従います。
ターゲット プラットフォームには、ベース ハードウェア デザインと、宣言されたインターフェイスにアクセラレータを接続するのに使用されたメタデータが含まれます。プラットフォームを選択するか、Vivado Design Suite からエクスポートした XSA からプラットフォーム プロジェクトを作成します。
アプリケーション プロジェクトをシステム プロジェクトに配置し、プロセッサに関連付けます。
ドメインでは、ターゲット プラットフォームでホスト プログラムを実行するのに使用されるプロセッサおよびオペレーティング システムを定義します。
アプリケーションのテンプレートを選択して、開発を迅速に開始します。ウィザードの各ページで次の表の情報に基づいて設定を選択します。
表 9: ウィザード情報
ウィザード画面
システム プロパティ
設定または使用するコマンド
Platform
Create a new platform from hardware (XSA)
[Browse] をクリックして XSA ファイルを追加
Platform Name
vck190_platform
Application Project Detail
Application project name
freertos_gpio_test
Select a system project
+Create New
System project name
freertos_gpio_test_system
Processor
versal_cips _0_pspmc_0_psv_cortexr5_0
Dom
Select a domain
+Create New
Name
デフォルト名入力済み
Display Name
デフォルト名入力済み
Operating System
freertos10_xilinx
Processor
versal_cips _0_pspmc_0_psv_cortexr5_0
Templates
Available
Empty
Templates
Application (C)
Vitis ソフトウェア プラットフォームは、上記の手順を実行した後、Explorer ビューの下に、プラットフォーム プロジェクト (vck190_platform) と freertos_gpio_test というアプリケーション プロジェクトを含むシステム プロジェクト (freertos_gpio_test_system) のボード サポート パッケージを作成します。
src/ ディレクトリの下のソース ファイルを削除し、freertos ソース コード ファイルを FreeRTOS プロジェクト パス
<design-package>/ch5_system_design_example_source__files/rpu/からsrc/ディレクトリへコピーします。Vitis IDE を設定して、FreeRTOS ボード サポート パッケージの下にある RPU アプリケーション デバッグ コンソールの AXI UARTLITE をイネーブルにします。
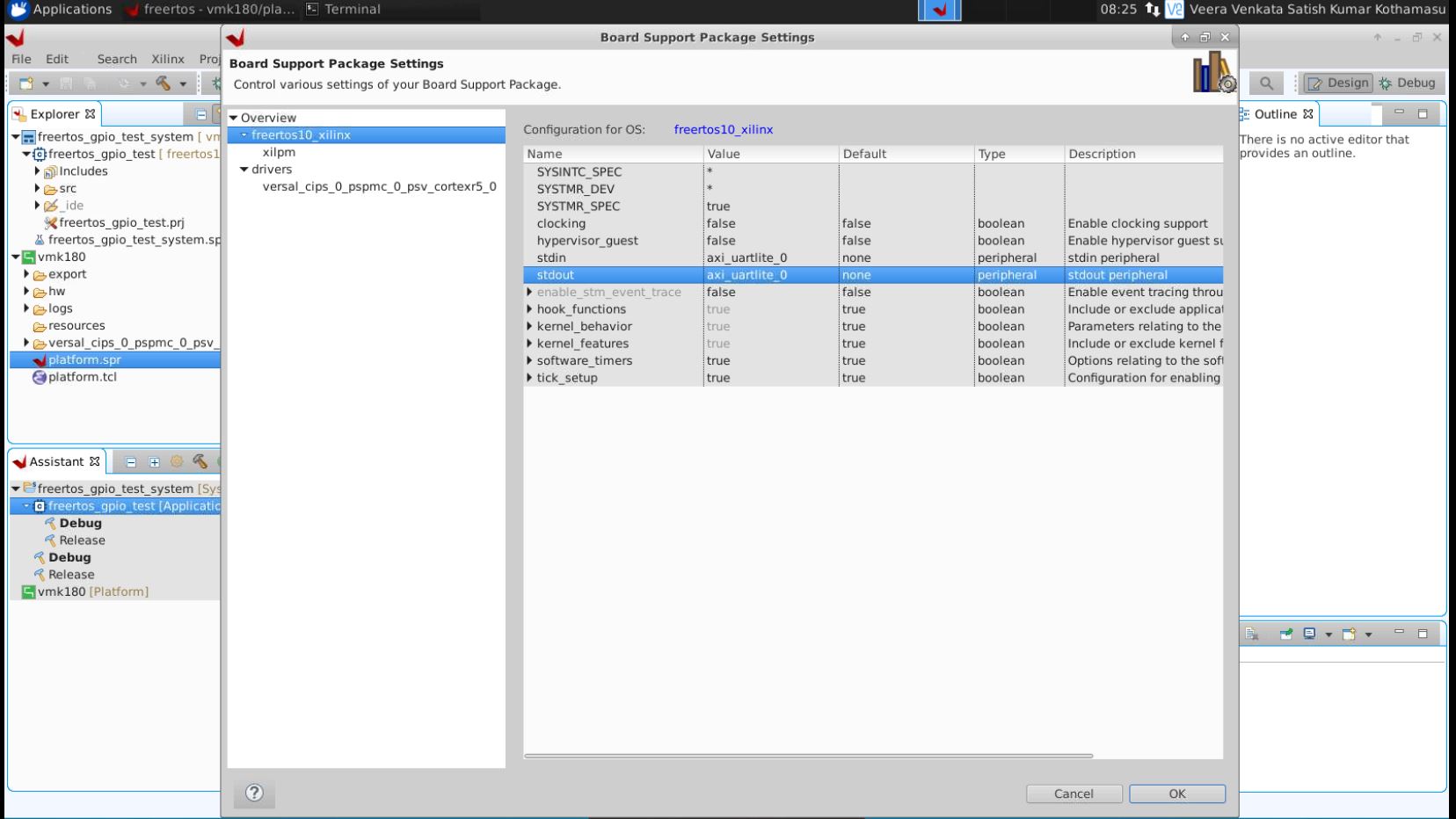
vck190_platform プロジェクトの platform.spr に移動し、次にボード サポート パッケージの下の [Modify BSP] を選択し、図に示すように <Y> キーを押して stdin と stdout を axi_uarlite_0 に変更します。
[OK] をクリックして上記の設定を保存し、コンフィギュレーション ウィザードを終了します。
freertos_gpio_test_system を右クリックし、[Build Project] をクリックします。または、
 をクリックします。
をクリックします。Linux イメージをビルドし、FreeRTOS ELF をイメージに組み込む方法については、「サンプル プロジェクト: PetaLinux を使用した Linux イメージの作成」を参照してください。
PL AXI UART シリアル コンソールでは、RPU デバッグ ログは次のように出力されます。
Gpio Initialization started Counter 0 Counter 1 Counter 2 Counter 3 Counter 4 Counter 5
サンプル プロジェクト: PetaLinux を使用した Linux イメージの作成¶
このセクションでは、Versal デバイス上で Arm Cortex-A72 コア ベースの APU 用の Linux オペレーティング システムをコンフィギュレーションしてビルドする手順について説明します。PetaLinux ツールをボード固有の BSP と使用すると、Linux イメージをコンフィギュレーションおよびビルドできます。
このサンプル プロジェクトには、Linux ホスト マシンが必要です。PetaLinux ツールの依存関係とインストール手順については、『PetaLinux ツールの資料: リファレンス ガイド (UG1144) を参照してください。
重要
この例では、VCK190 PetaLinux BSP を使用して PetaLinux プロジェクトを作成します。PetaLinux (VCK190/VMK180/VPK180) に該当する BSP がダウンロードされていることを確認します。
ボード |
QSPI/SD |
OSPI |
eMMC |
|---|---|---|---|
VCK190 プロダクション ボード |
|||
VMK180 プロダクション ボード |
|||
VPK180 プロダクション ボード |
該当なし |
該当なし |
各ボードの PetaLinux BSP を現在のディレクトリにコピーします。
PetaLinux 環境を設定します。
$ source <petalinux-tools-path>/settings.csh
次のコマンドを使用して PetaLinux プロジェクトを作成します。
$ petalinux-create -t project -s xilinx-vck190-vxxyy.z-final.bsp -n led_example
注記
VMK180 ボードの場合、コマンドの -s オプションの後に xilinx-vmk180-vxxyy.z-final.bsp を使用します。
次のコマンドを使用して、PetaLinux プロジェクト ディレクトリに移動します。
$cd led_example
ハードウェア プラットフォーム プロジェクトの XSA を Linux ホスト マシンにコピーします。
注記
VMK180 ボードの場合は、「デザイン例: AXI GPIO の使用」で生成した XSA ファイルを使用します。
次のコマンドを実行して BSP を再設定します。
$ petalinux-config --get-hw-description=<path till the directory containing the respective xsa file>
[PetaLinux Configuration] ウィンドウが開きます。この例では、このウィンドウで何も変更する必要はありません。
<Save> をクリックして上記の設定を保存し、<Exit> をクリックして、コンフィギュレーション ウィザードを終了します。
次のコマンドを使用して、PetaLinux プロジェクト内に gpiotest という名前の Linux アプリケーションを作成します。
$petalinux-create -t apps --template install --name gpiotest --enable
次のコマンドを使用して、
<design-package>/<vck190 or vmk180>/linux/bootimagesからプロジェクトにアプリケーション ファイルをコピーします。$cp <design-package>/ch5_system_design_example_source__files/apu/gpiotest_app/gpiotest/files/* <plnxproj-root>/project-spec/meta-user/recipes-apps/gpiotest/files/ $cp <design-package>/ch5_system_design_example_source__files/apu/gpiotest_app/gpiotest/gpiotest.bb <plnx-proj-root>/project-spec/meta-user/recipes-apps/gpiotest/gpiotest.bb $cp <design-package>/ch5_system_design_example_source__files/apu/device_tree/system-user.dtsi <plnx-proj-root>/project-spec/meta-user/recipes-bsp/device-tree/files/system-user.dtsi
カーネル コンフィギュレーション内で GPIO サポートをイネーブルにします。
$petalinux-config -c kernel
注記
このコマンドは、PetaLinux プロジェクトのカーネル コンフィギュレーション ウィザードを開きます。
[Device drivers] → [GPIO Support] をクリックし、<Y> キーを押してイネーブルにします。Enter キーを押たあとに、<Y> キーを押して、Debug GPIO コールと
/sys/class/gpio/...(sysfs interface)のエントリをイネーブルにします。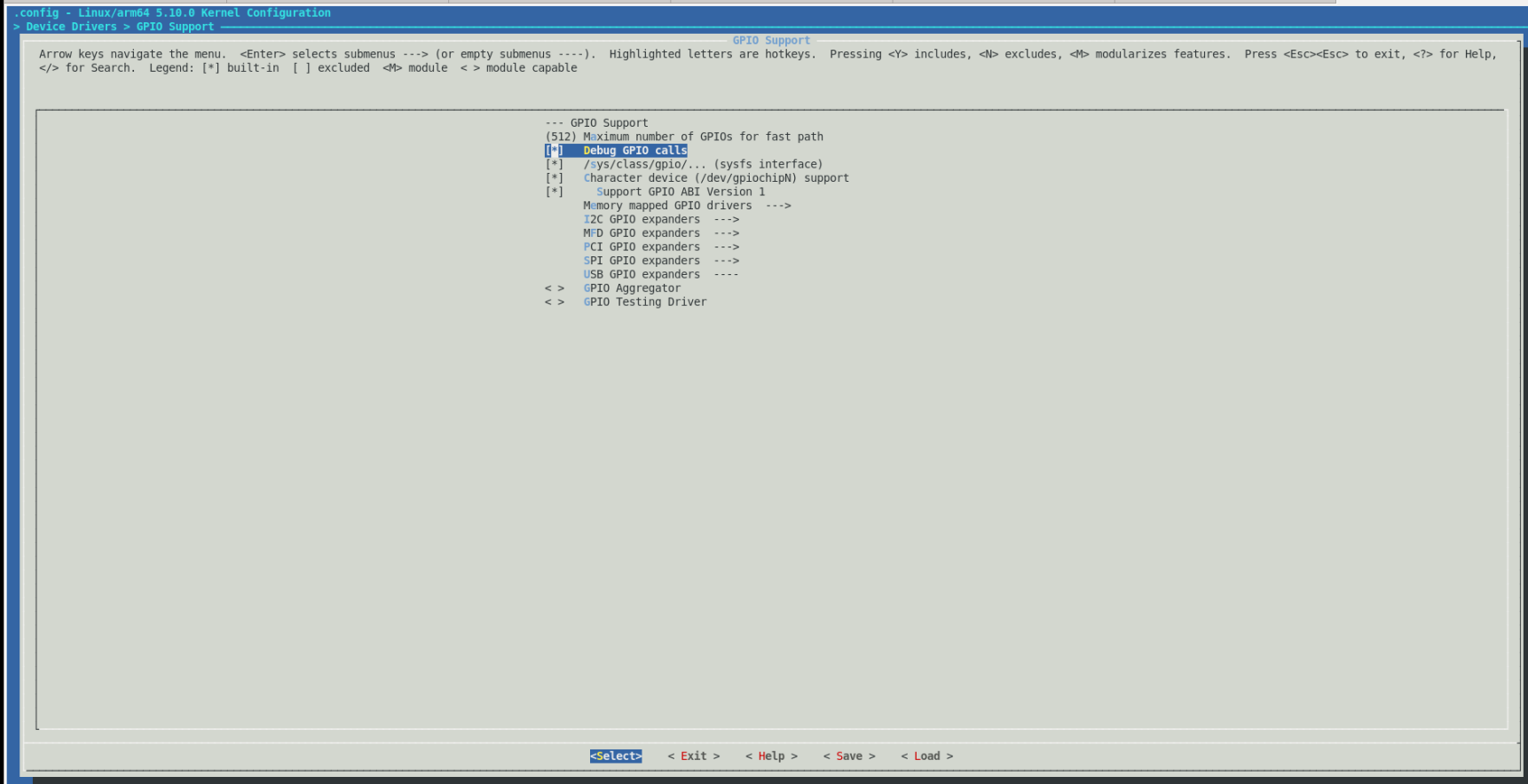
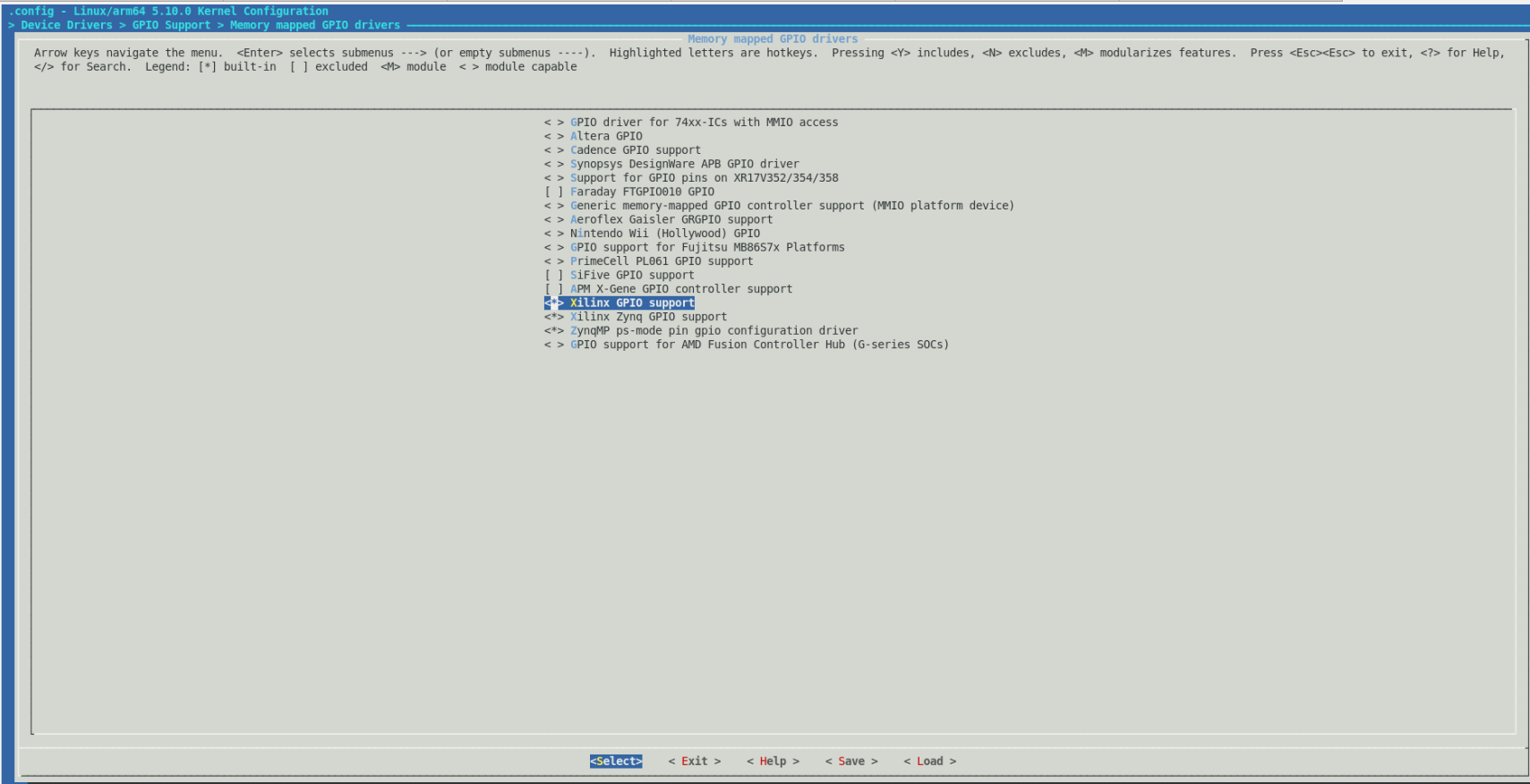
[Memory mapped GPIO drivers] まで移動し、<Y> キーを押して、GPIO のサポートおよび Zynq GPIO のサポートをイネーブルにします。
<Save> をクリックして上記の設定を保存し、<Exit> をクリックして、コンフィギュレーション ウィザードを終了します。
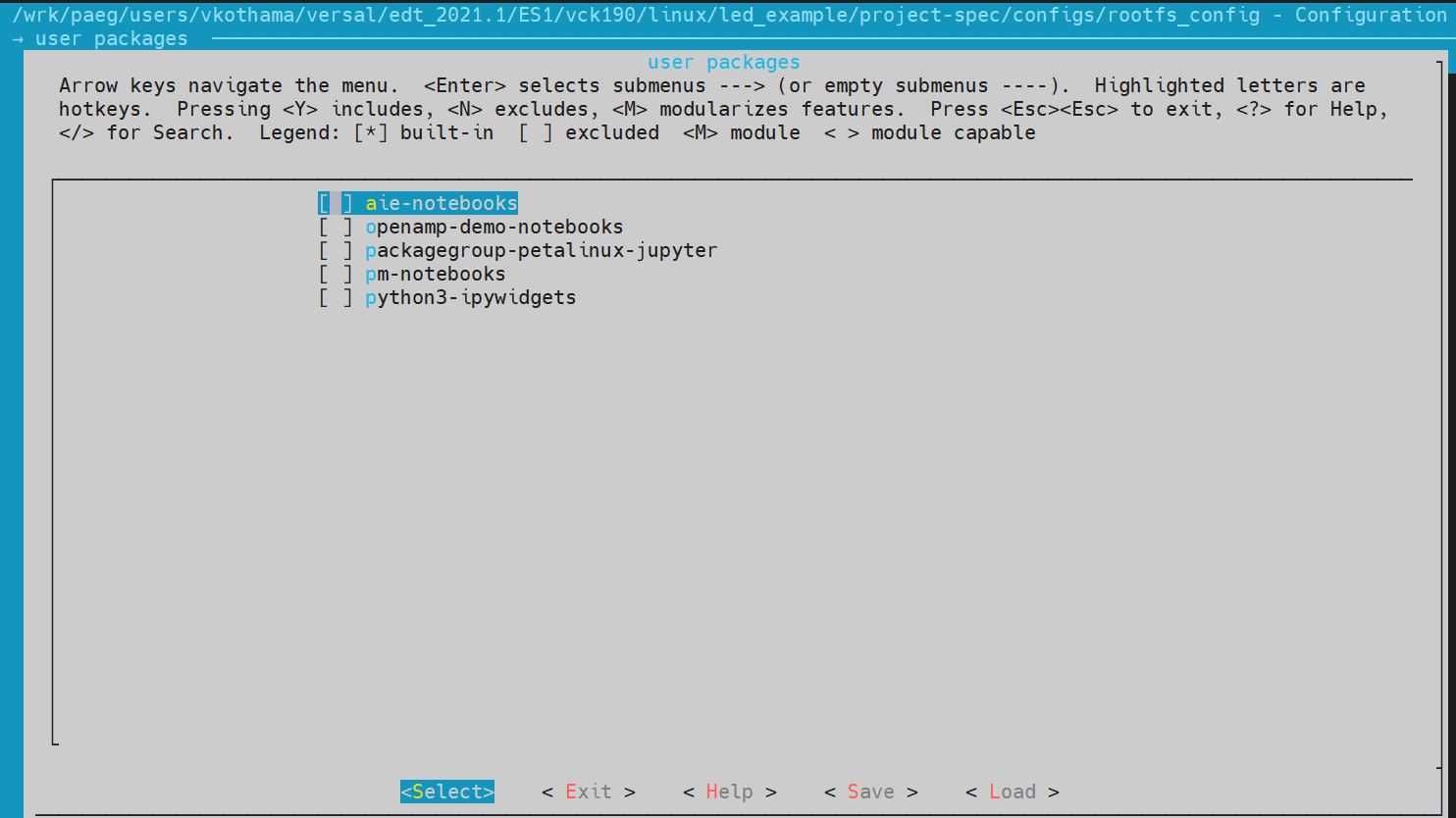
AIE、STDC++、および Tcl オプションをディスエーブルにし、ROOTFS のサイズを SD および OSPI/QSPI フラッシュ メモリのパーティションの両方に収まるように、ROOTFS を構成します。
petalinux-config -c rootfs
次の図のように、ユーザー パッケージに移動し、<Y> キーを押して aie-notebooks、openamp-demo-notebooks、packagegroup-petalinux-jupyter、pm-notebooks、python3-ipywidgets のサポートをディスエーブルにします。
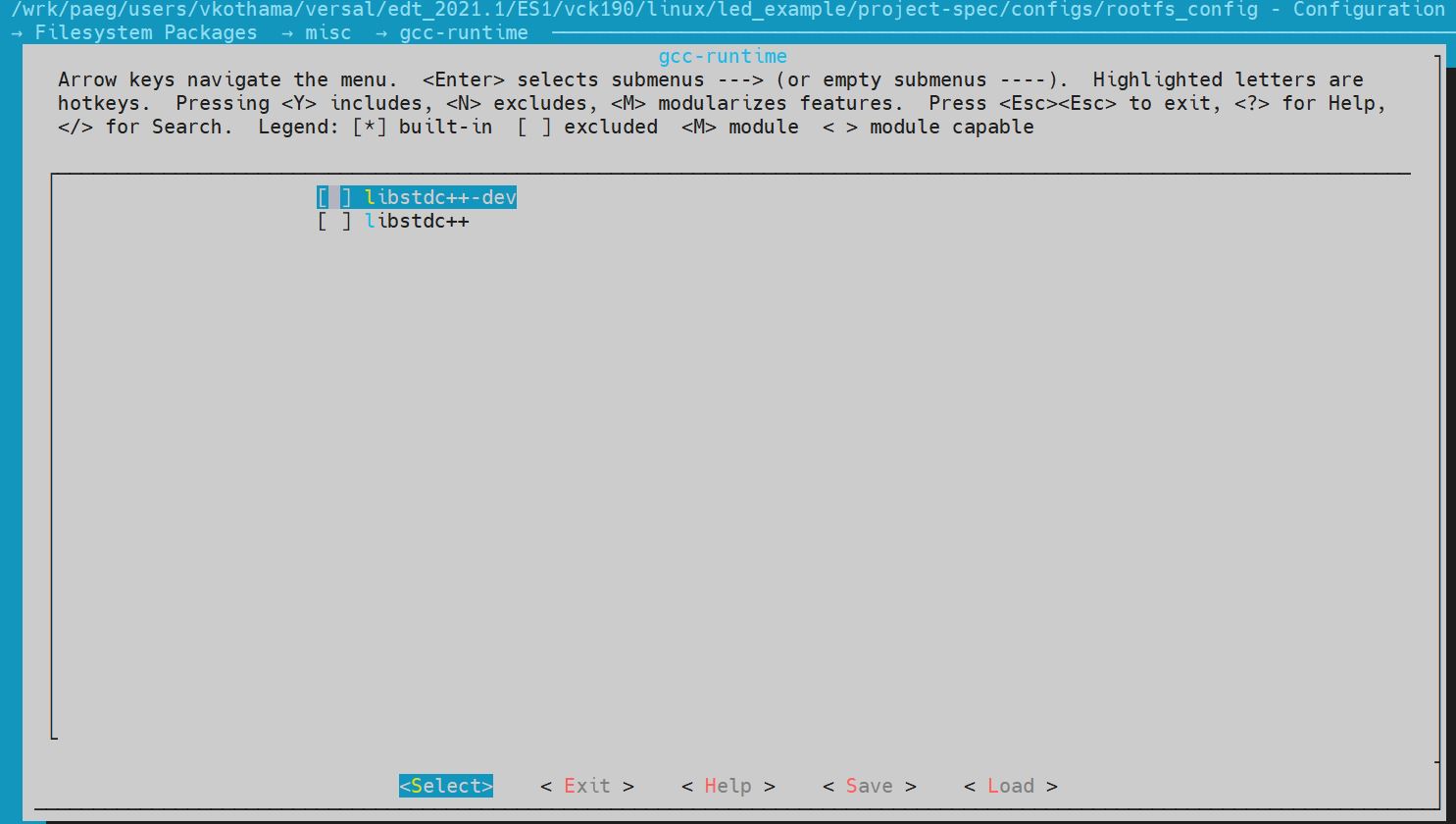
次の図のように、[Filesystem Packages] → [misc] → [gcc-runtime] に移動し、<Y> キーを押して [libstdc++ support] をディスエーブルにします。
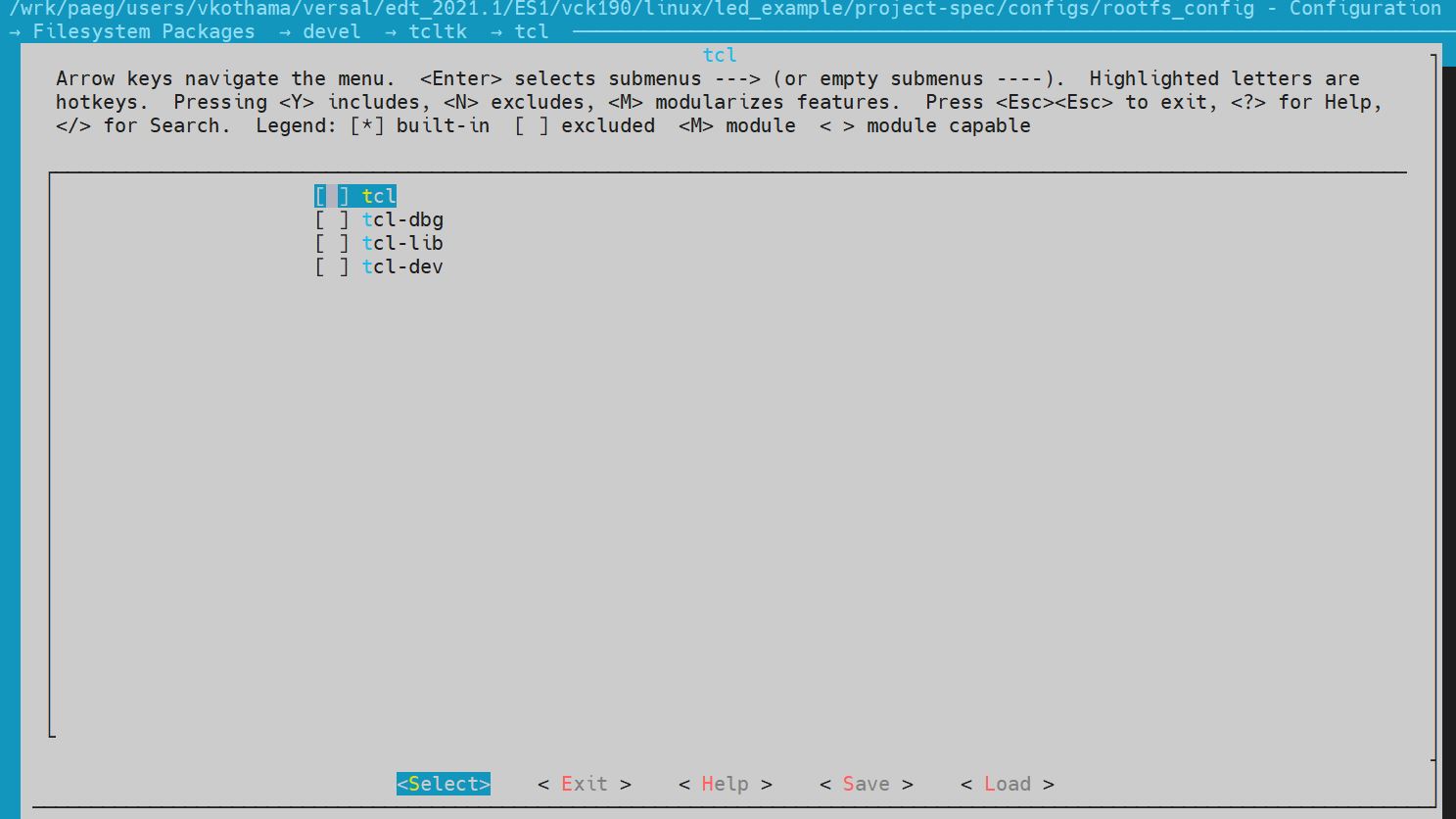
次の図のように、[Filesystem Packages] → [devel] → [tcltk] → [Tcl] に移動し、<Y> キーを押して [tcl support] をディスエーブルにします。
<Save> をクリックして上記の設定を保存し、<Exit> をクリックして、コンフィギュレーション ウィザードを終了します。
注記
OSPI および eMMC ブート モードは、VCK190/VMK180 RevB 量産ボードでのみ動作します。
次のコマンドを使用して、Linux イメージをビルドします。
$ petalinux-build
BIF ファイルを使用した FreeRTOS と APU イメージの結合¶
Vitis IDE ワークスペースで XSCT コンソールを開きます。
PetaLinux プロジェクトの
images/linuxディレクトリに移動します。$ cd <petalinux-project>/images/linux/
Freertos ELF ファイルは、QSPI/SD ブート イメージに対してのみサポートされています。
<design-package>/vck190/freertos/bootimages/freertos_gpio_test.elfから freertos_gpio_test.elf を images/linux ディレクトリにコピーします。$ cp <design-package>/vck190/ready_to_test/qspi_images/freertos/freertos_gpio_test.elf .
<design-package>/から bootgen.bif をimages/linuxディレクトリにコピーします。$ cp <design-package>/vck190/ready_to_test/qspi_images/linux/bootgen.bif .
BOOT.BIN を作成するために、次のコマンドを実行します。
$ bootgen -image bootgen.bif -arch versal -o BOOT.BIN -w
これで、
<petalinux-project>/images/linux/ディレクトリに BOOT.BIN イメージ ファイルが作成されます。
注記
SD ブート モードを使用してイメージを実行するには、「SD ブート モードのブート シーケンス」を参照してください。