AVED Management Controller (AMC) - Architecture and Design¶
Overview¶
The AVED Management Controller (AMC) provides management and control of the Alveo RPU. Its basic features include, but are not limited to:
In-Band Telemetry (AVED InBand Telemetry Application)
Host (AMI) communication (AVED Management Interface (AMI) Proxy Driver)
Sensor Control (AVED Sensor Control (ASC) Proxy Driver)
QSFP Control (AVED External Device Control (AXC) Proxy Driver)
Clock Control (AVED Clock Control (ACC) Proxy Driver)
Download and Programming to Flash (AVED Programming Control (APC) Proxy Driver)
RMI Control
In addition, the AMC is fully abstracted from:
The Firmware Driver (Firmware Interface Abstraction Layer (FAL))
Event driven architecture is provided by the Event Library (EVL).
Layered Architecture¶
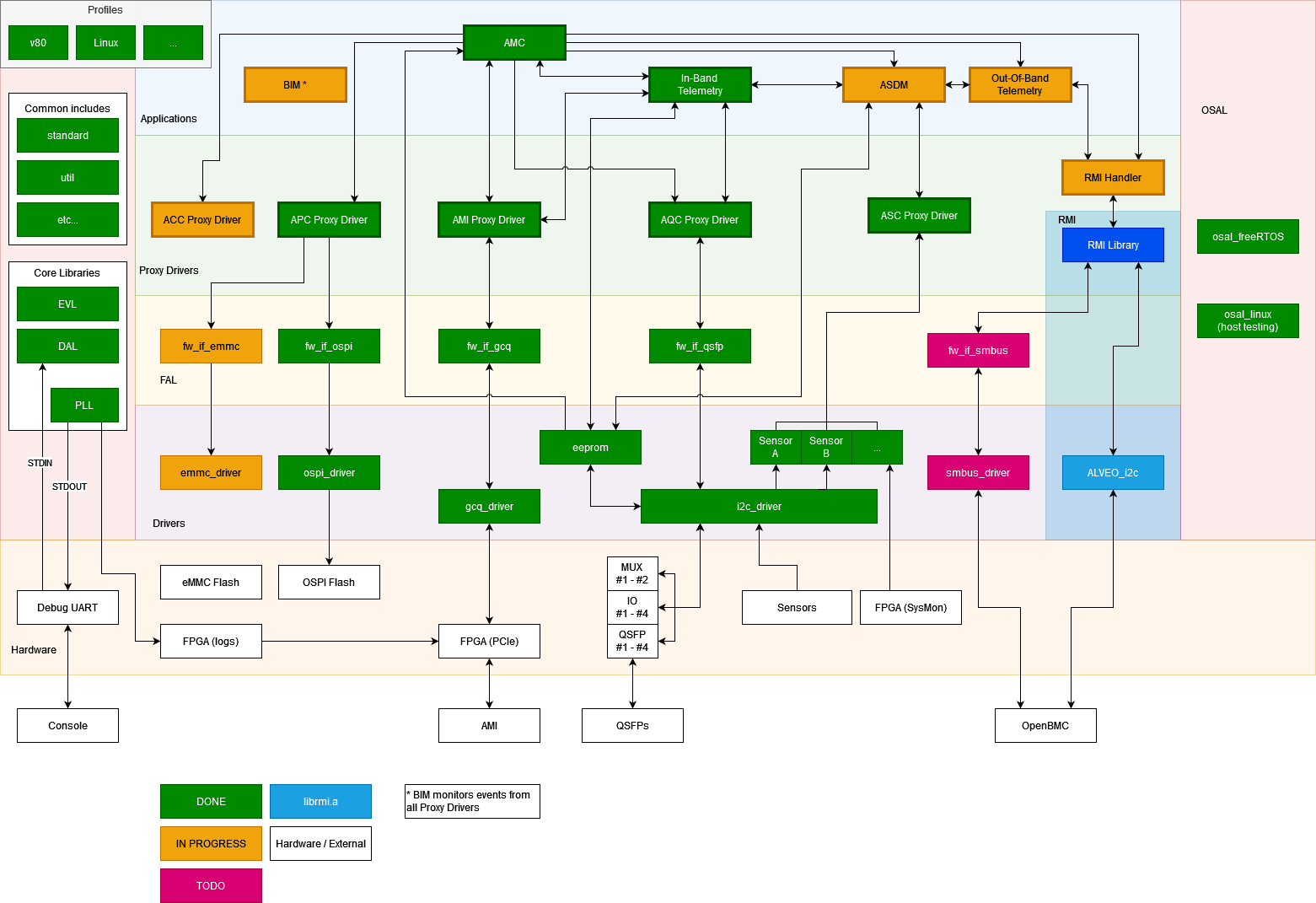
Firmware Interface Abstraction Layer (FAL)¶
Firmware Interface (FW_IF) Abstraction Layer - Data Center Group - Xilinx Enterprise Wiki
The FAL allows the hardware and associated drivers to be swapped out without requiring a change to the higher level data formatting and behavior.
It also allows Proxy Drivers to be modified to use a different interface with minimal changes.
Operating System Abstraction Layer (OSAL)¶
Operating System Abstraction Layer (OSAL) - Data Center Group - Xilinx Enterprise Wiki
The OSAL allows the AMC to be ported to a different OS without requiring code changes in the AMC or its layers.
A common osal.h API is provided with a generic API. FreeRTOS and Linux implementations of this API are released with the AMC - however, a user can provide their own RTOS implementation if they prefer (e.g. osal_FreeRTOS.c can be replaced with a user-written osal_UCOS.c).
Common definitions and Core Libraries¶
Core Libs¶
Core Libraries are modules that:
Are NOT BOUND to a specific proxy driver or application’s behavior
Are REUSABLE across any other module
The Core Library layer exists within the Common layer, which holds all system-common includes and definitions.
Event Library (EVL)¶
The EVL allows event signaling to ‘higher’ layers. It is predominantly used for proxy drivers to communicate to the application layer whilst maintaining agnosticism and abstraction.
See Events and Signals for more information.
Debug Access Library (DAL)¶
The DAL provides an API to create and maintain a dynamic menu structure that sits above STDIN, providing a debug interface for calling into any API in the AMC.
Note - the debug interface is provided for development and debugging purposes only; it is not supported nor maintained, and incorrect usage may have unintended consequences to both firmware and hardware.
Printing and Logging Library (PLL)¶
The PLL provides an API to handle all thread-safe printing and logging. This core library sits above STDOUT/STDIN, and allows for multiple output streams (stdout/ PCIe etc), at different logging levels (ALL, DEBUG, INFO, ERROR).
Common Includes¶
Standard definitions¶
The standard.h header file provides project-wide definitions for regular use - return codes, typedefs, etc.
Utility definitions¶
The util.h header file provides project-wide utility definitions and macros for regular use - printing macros, common calculations, etc.
Event ID¶
The event_id.h header file contains definitions of unique event ids for each proxy driver within AMC.
Device Drivers¶
Device drivers provide an API over some BSP-provided drivers and utilities as well as APIs to interact with other hardware devices.
EEPROM¶
The EEPROM driver implements functions to access the manufacturing EEPROM (using the I2C driver).
EMMC (IN_PROGRESS)¶
The EMMC driver allows simple reading and writing, of eMMC flash memory.
GCQ¶
The GCQ driver has been implemented as a standalone driver (submodule).
I2C¶
The I2C driver allows simple I2C reading, writing, and write-read combinations (over the Xilinx Xiic driver). This allows the sensors, QSFP layer, etc, to perform I2C transactions without having to initialise or maintain an I2C instance.
OSPI¶
The OSPI driver allows simple reading and writing, of flash devices (over the Xilinx OSPIPSV device driver).
Sensors¶
cat34ts02¶
The cat34ts02 driver provides temperature reading (using the I2C driver) from the cat34ts02 sensor.
ina3221¶
The ina3221 driver provides voltage, current and power readings (using the I2C driver) from the ina3221 sensor.
isl68221¶
The isl68221 driver provides voltage, current and temperature readings (using the I2C driver) from the isl68221 sensor.
SysMon¶
The SysMon (system monitor) driver allows temperature reading (using the Xilinx xSysMonPsv driver) from the FPGA.
Profiles¶
The Profiles hold all profile-specific (board-specific) includes and definitions, allowing AMC to be ported to different target hardware without requiring code changes in the AMC or its layers.
See Profiles and CMake build process#Profiles for a more detailed description of how profiles are used to port AMC across different platforms.
Proxy Drivers¶
The Proxy drivers abstract a capability’s behavior away from it’s functionality. In other words, a proxy driver allows the application layer to consider AMC capabilities (e.g. clock control, host communications, sensor handling) as abstract concepts, rather than requiring them to understand the inner workings and behavior of these parts of the AMC.
Inter-Proxy communication¶
Proxy drivers do not communicate with other proxy drivers, as this would break their independence from behavioral design.
In the event where a proxy driver requires a call into another (this should never be more than a simple read/write, or status return) it should done via the EVL.
E.g.:
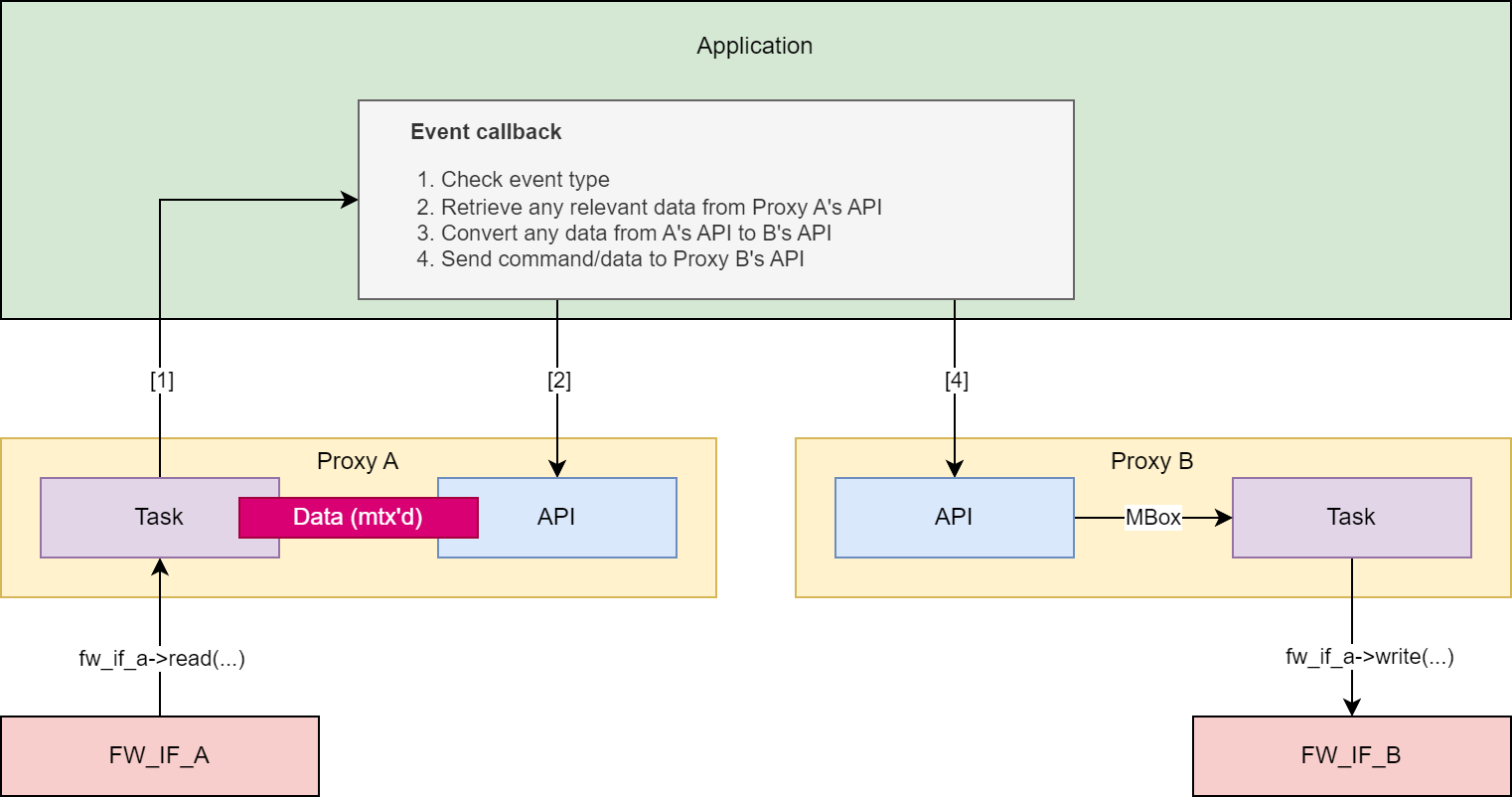
Note - in many cases, a “Get” API for a proxy will be called within the EVL Record signaled by the proxy driver task itself. In that case, the data mutexing is redundant.
However, the purpose of a “Get” API is to expose data to any application call, and so in theory a “Get” function can be called from multiple concurrent tasks at any time.
E.g.:
Proxy_A stores data (grabs and releases its mutex) and raises the appropriate event.
The application’s event_callback A (still within the context of Proxy_A’s task) calls Proxy_A’s “Get” function.
Proxy’s A’s “Get” function waits for the mutex, grabs it, copies the data, and releases the mutex.
At the same time, proxy B raises an event. In this example, the corresponding event callback requires retrieving data from Proxy_A.
The application’s event_callback B (within the context of Proxy_B’s task) calls Proxy_A’s “Get” function.
Proxy’s B’s “Get” function waits for the mutex, grabs it, copies the data, and releases the mutex.
Applications¶
The Application layers provides control of the overall AMC, while still allowing a logical separation of different parts of the overall control.
Main application (AMC)¶
The main AMC application provides the initialization of all other layers and modules within the system.
It also is the first event handler for each proxy driver event raised, passing any AMI Host commands to the relevant submodule (excluding telemetry).
In-Band Telemetry¶
The In-Band Telemetry application handles the events and communication between the Host and the Sensors.
Out-Of-Band Telemetry (IN_PROGRESS)¶
The Out-Of-Band Telemetry application handles the events and communication between the Remote Management Interface (RMI) and the Sensors.
Alveo Sensor Data Model (ASDM)¶
The ASDM app defines the ASDM structure for the specific version of the ASDM used by the AMC.
AMC is designed to be as separated from the ASDM as much as possible. If the ASDM definition is changed or a new version is required, all that should change is the ASDM application, and any references to it in the In-Band Telemetry/Out-Of-Band Telemetry applications.
Built-In-Monitoring Application (BIM)¶
The Built-In-Monitoring Application (BIM) monitors all events throughout AMC and logs errors accordingly
Tasks¶
With the exception of the AMC Main Task, each task handles RX’ing and TX’ing:
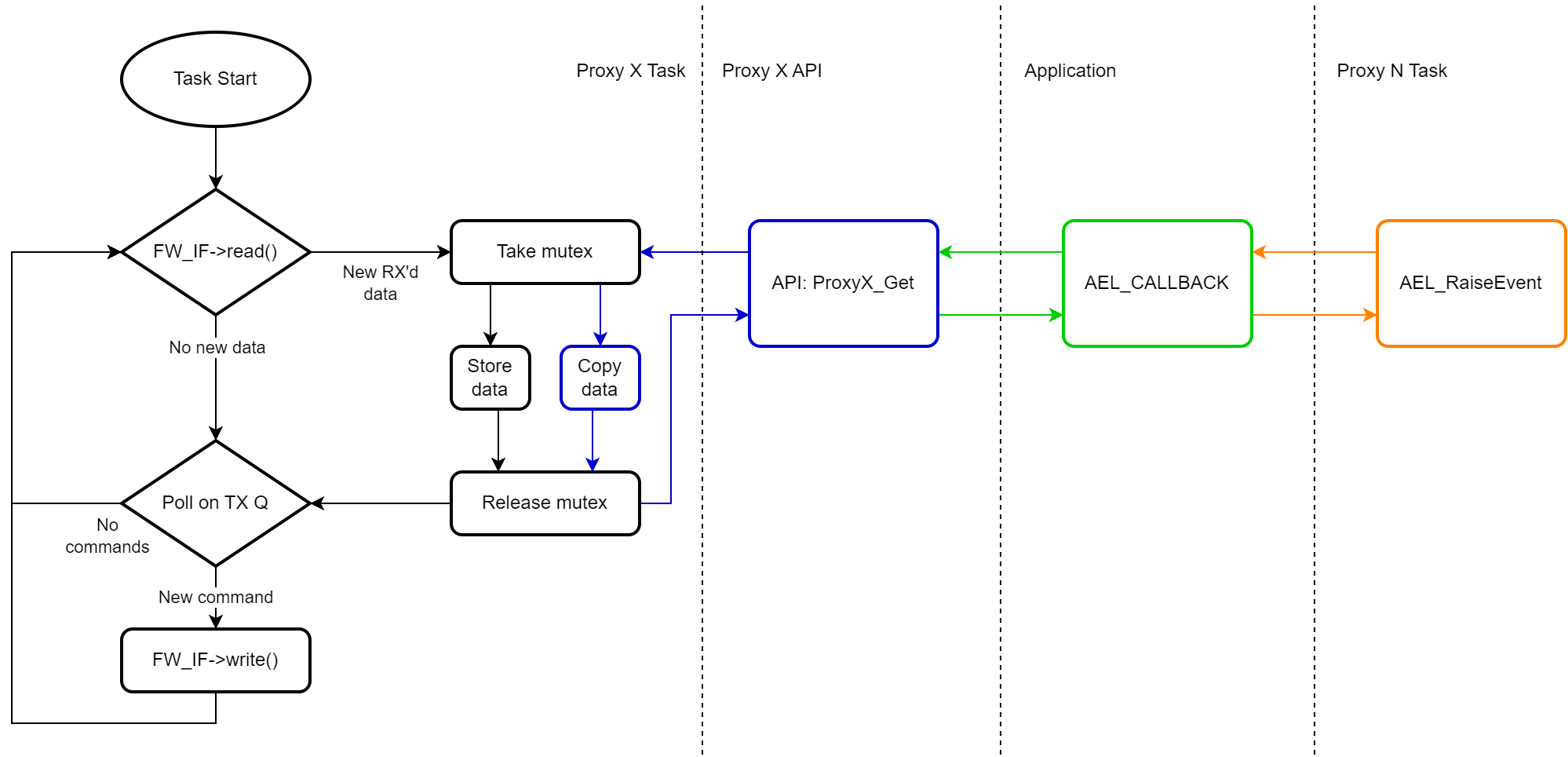
Note: In the above example, Proxy N can be the same proxy as Proxy X.
AMC (main task)¶
Description
Initialized from the project’s main entry point.
“Top-layer” task that allows communication between other tasks.
Responsibilities
Initialize other tasks.
Create global resources.
Bind proxy driver callbacks (and maintain responsibility for those callbacks).
Handle proxy driver events (via the afore-mentioned callbacks) and pass data to relevant tasks.
Initialisation
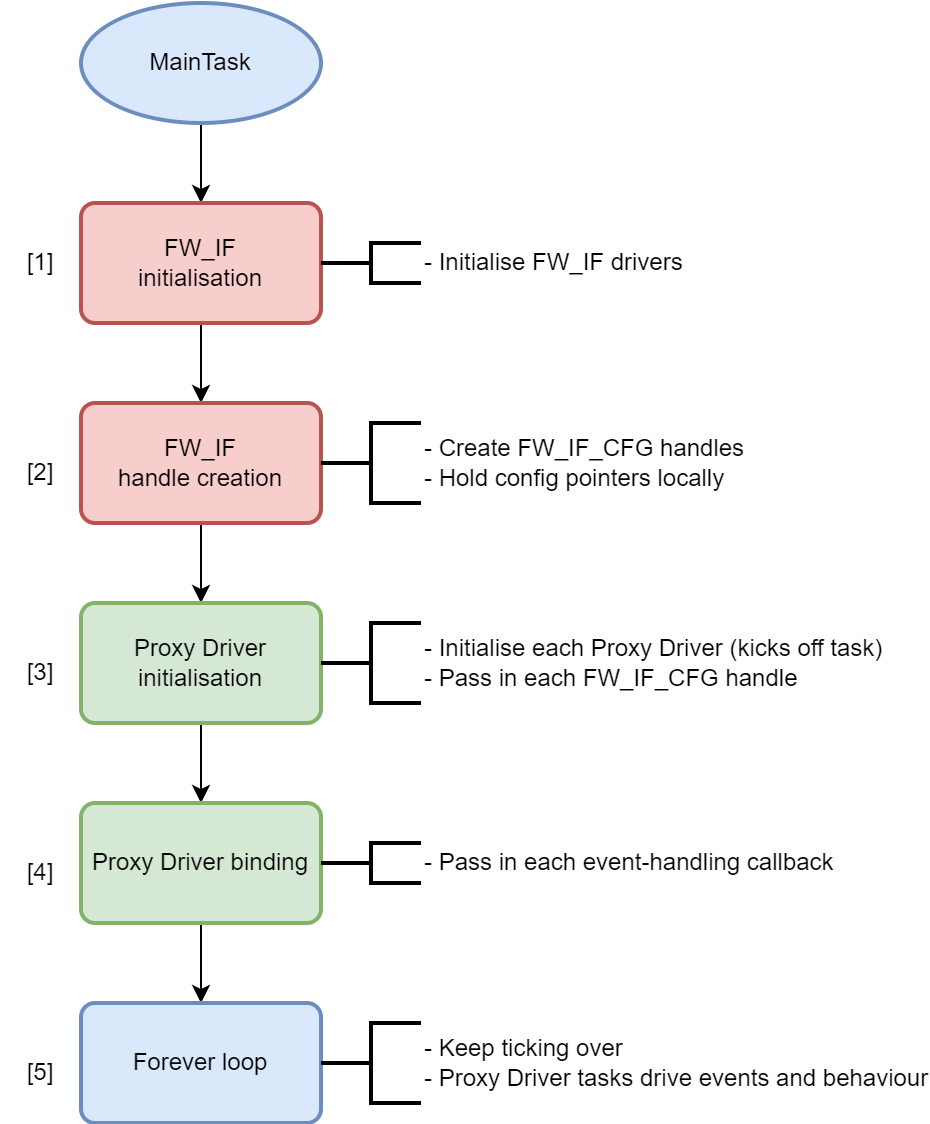
fw_if_XXX_init calls.
fw_if_XXX_create calls.
FW_IF_CFG structures held locally in the AMC application level.
XXX_PROXY_DRIVER_Initialise calls.
FW_IF_CFG handle and Proxy ID
XXX_PROXY_DRIVER_BindCallback calls.
Event-handling callback passed in.
Do nothing - keep alive task.
If available, can flash an LED or kick a watchdog to show signs of life.
AVED Management Interface (AMI) Proxy Driver¶
Description
Initialized from the AMC task.
Handles communication to/from the Host (AMI).
The only part of the AMC that needs to know about the GCQ message format and contents.
Responsibilities
Monitors the FW_IF data for requests from AMI including:
PDI download request
PDI copy request
Sensor request
Identity request
Boot Select request
Heartbeat request
EEPROM read/write request
Module read/write request
Provides “Get” APIs to the AMC application for messages Rx’d from the AMI. These include APIs to:
Get the PDI download request
Get the PDI copy request
Get the Sensor request
Get the Boot Select request
Get the eeprom read write request
Get the module read write request
Print all the stats gathered by the application
Clear all the stats in the application
Provides “Set” APIs to the AMC application for messages to Tx to the AMI. These include APIs to:
Set the response after the PDI download has completed
Set the response after the PDI copy has completed
Set the response after the sensor request has completed
Set the identity request response
Set the response after the Boot select has completed
Set the response after the EEPROM read/write has completed
Set the response after the module read/write has completed
AVED Programming Control (APC) Proxy Driver¶
Description
Initialized from the AMC task.
Handles flash-programming related commands.
Provides a single interface to the flash memory for the application.
Responsibilities
Provides “Get” APIs to the AMC application for retrieving information on the flash memory. These include APIs to:
Get the Flash Partition Table (FPT) Header
Get a Flash Partition Table (FPT) Partition
Print all the stats gathered by the proxy driver
Clear all the stats in the proxy driver
Provides “Set” APIs to the AMC application for writing/committing to flash memory. These include APIs to:
Download an image to a location in non volatile memory
Download an image with an FPT to a location in NV memory
Copy an image from one partition to another
Select which partition to boot from
Enable the hot reset capability
AVED Clock Control (ACC) Proxy Driver¶
Description
Initialized from the AMC task.
Handles clock related commands (throttling, shutdown, etc.).
Provides a single interface to any clock control for the application.
Responsibilities
Provide “Get” API to the AMC application for retrieving information on the clocks. These include APIs to:
Print all the stats gathered in this driver
Clear all the stats in this driver
Provide “Set” API to the AMC application for managing and controlling the clocks. These include APIs to:
Enable Clock Shutdown for threshold crossing
Disable Clock Shutdown for threshold crossing
Report to ACC that a sensor has exceeded fatal limit
Report to ACC that a sensor has exceeded critical limit
Report to ACC that a sensor has exceeded warning limit
Re-enable the clock if previously shutdown
AVED External Device Control (AXC) Proxy Driver¶
Description
Initialized from the AMC task.
Handles external device related commands.
Provides a single interface to any external device control for the application.
Provides a simple callback for other tasks (e.g. the ASC) to read sensor data.
Responsibilities
Provide “Get” API to the AMC application for retrieving information on the QSFP and other external devices. These include APIs to:
Read real-time byte value from desired external device memory map
Read real-time memory map from desired QSFP
Read single status from QSFP IO Expander
Read all statuses from QSFP IO Expander
Read real-time temperature value from desired external device memory map
Print all the stats gathered by the application
Clear all the stats in the application
Check if a device exists and the page/byte offset are valid
Provide “Set” API to the AMC application for managing and controlling the QSFP devices. These include APIs to:
Write byte value to desired external device memory map
Provide simple “Get” function typedef to be used as a callback by an sensor-reading applications or processes.
AVED Sensor Control (ASC) Proxy Driver¶
Description
Initialized from the AMC task.
Handles sensor related commands (including ASDM).
Provides a single interface to any sensor control for the application.
Responsibilities
Provide “Get” API to the AMC application for retrieving information on the sensors (including ASDM data). These include APIs to:
Get all sensor data
Get single sensor data by ID
Get single sensor data by name
Print all of the stats gathered by the application
Clear all of the stats in the application
Provide “Set” API to the AMC application for managing and controlling the sensors. These include APIs to:
Reset current, average, max and status values for all sensors
Reset current, average, max and status values for a single sensor by ID
Reset current, average, max and status values for a single sensor by name
RMI Handler (IN_PROGRESS)¶
Description
Initialized from the AMC task.
Handles RMI control.
Provides a single interface to the RMI for the application.
Responsibilities
Provide “Get” API to the AMC application for retrieving information on the RMI.
Provide “Set” API to the AMC application for managing and updating the RMI.
Scheduling¶
The AMC shall use Round-Robin scheduling.
Event-driven architecture¶
Overview¶
Proxy Drivers provide specified behavior and control for a particular aspect of the system. They allow the applications (e.g. AMC) to view a subsystem (e.g. sensor control, host communications, etc.) as an API reduced to Sets and Gets, and to react to the proxy driver based upon real-time events.
This functionality is provided by the Event Library (EVL). This library provides a common API for any module wishing to provide callback binding and event raising to another module.
Data flow¶
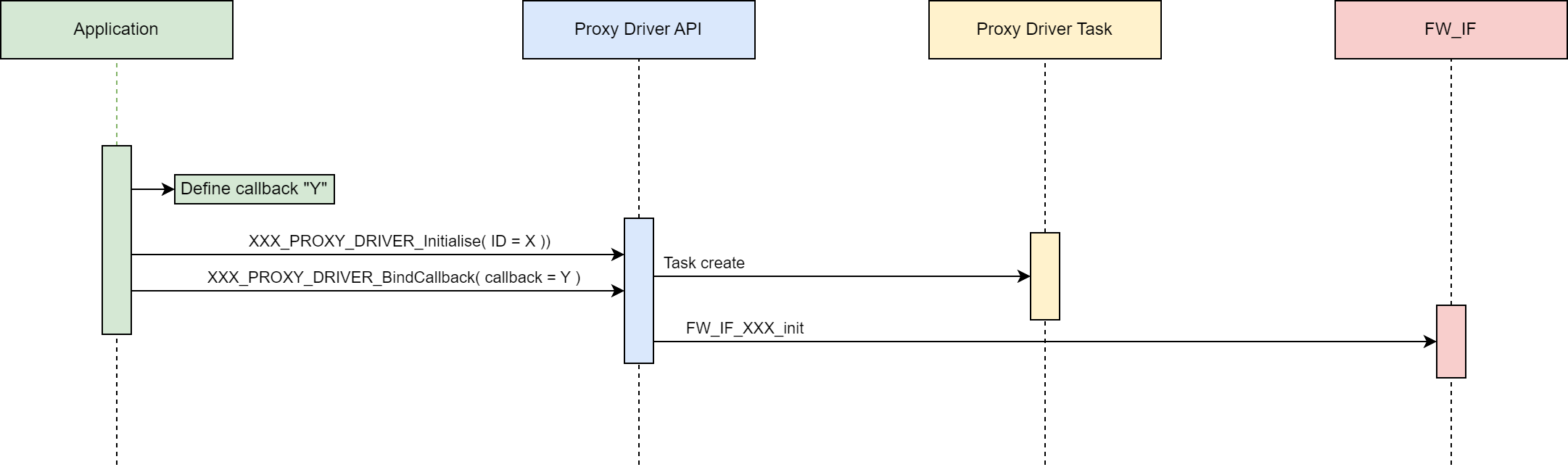
Initialization¶
Application initializes local data.
Proxy Driver stores proxy ID and callback function pointer from the application.
Proxy Driver initializes/creates firmware interfaces and drivers (where applicable).
Proxy driver creates task.
Getting Data¶
Proxy driver (1) task receives data from a firmware interface or driver, etc.
Proxy driver (1) task stores data in thread-safe (mutex-protected) local data struct.
Proxy driver (1) task raises event via the callback function pointer.
Application callback function (in the task context) calls proxy driver (1) API “Get” function to retrieve data.
Another Proxy driver (2) raises an event that requires retrieving the same data.
Application callback function (in the task context) calls proxy driver (1) API “Get” function to retrieve data.
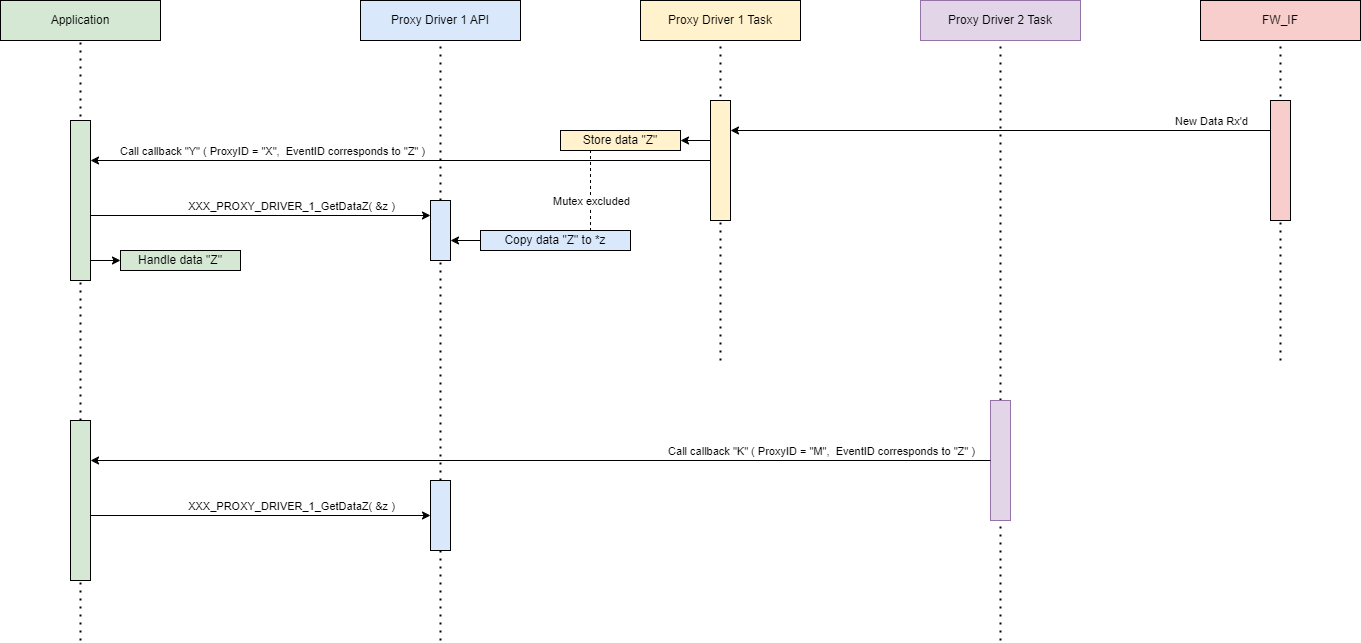
The proxy driver’s “Get” API functions provide a public exposure of its data.
As it is possible for multiple tasks to raise events requesting the same data, the “Get” API functions must mutex the retrieved data.
E.g.:
Example data getting
int AMI_PROXY_DRIVER_GetRequest( AMI_PROXY_DRIVER_REQUEST_TYPE *pxRequestType )
{
int iStatus = ERROR;
if( NULL != pxRequestType )
{
/* data is mtx protected to allow API to be called from concurrent tasks */
if( GRAB_RX_MUTEX )
{
*pxRequestType = localData->pxRxData->xLastRequest;
RELEASE_RX_MUTEX;
}
iStatus = OK;
}
return iStatus;
}
Setting Data¶
Application passes data to the proxy driver.
Proxy driver stores data for the proxy task driver task, either by:
Posting data in a mailbox which the task will pend on, OR
Storing the data to the local data structure (within a mutex guard).
Proxy driver task writes data to a firmware interface or driver, etc.
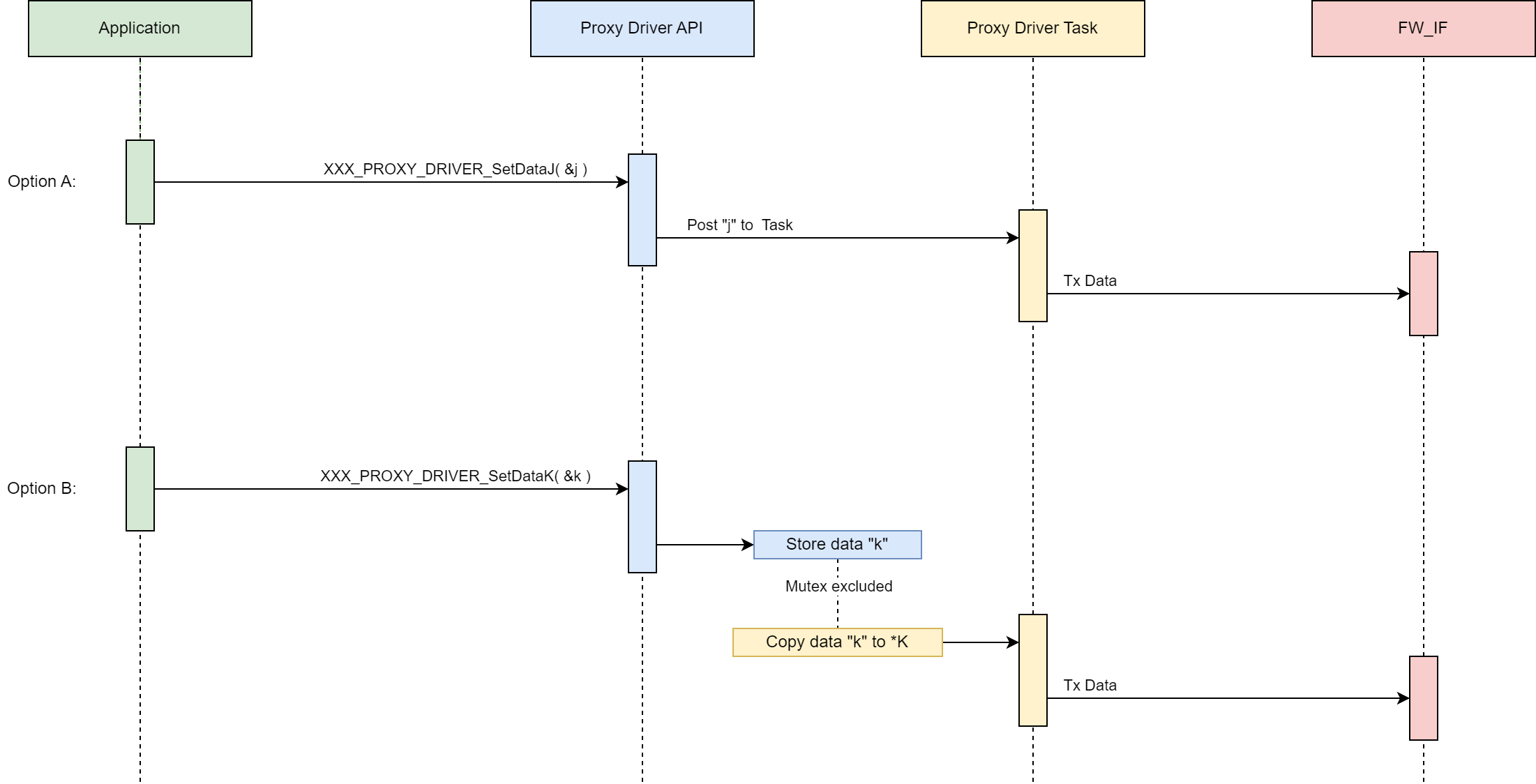
Option A (mailbox posting) is best used when the data must be acted upon in as real-time as possible (e.g. writing out to a driver).
Option B (mutexed storing) is best used when the data will be picked up in the next loop iteration or a subsequent action (e.g. an algorithm input).
Note - the “Setting” mutex should be a separate mutex from the “Getting mutex”.
The proxy driver’s “Set” API functions allow public setting of its data.
Option A e.g.:
Example data setting (A)
/* structure used post message to the proxy task */
typedef struct _AMI_MSG_Q
{ AMI_PROXY_DRIVER_MSG_TYPE xCmd;
union
{ AMI_PROXY_DRIVER_SENSOR_UPDATE xSensorUpdate;
/* etc */
};
} AMI_MSG_Q;
int AMI_PROXY_DRIVER_SetSensorUpdates( AMI_PROXY_DRIVER_SENSOR_UPDATE *pxSensorUpdate )
{
int iStatus = ERROR;
if( NULL != pxSensorUpdate )
{ AMI_MSG_Q xMsgData = { 0 };
/* set message type and copy new data */
xMsgData.xCmd = AMI_PROXY_DRIVER_MSG_SENSOR_UPDATE;
memcpy( &xMsgData.xSensorUpdate, pxSensorUpdate, sizeof( AMI_PROXY_DRIVER_SENSOR_UPDATE ) );
/* post to the queue */
if( OK == iOSAL_mailbox_post( &localData->pxQHandle, ( void * )&xMsgData, sizeof( AMI_MSG_Q ), OSAL_NO_WAIT ) )
{
iStatus = OK;
}
}
return iStatus;
}
Option B e.g.:
Example data setting (B)
int AMI_PROXY_DRIVER_SetRequest( AMI_PROXY_DRIVER_SENSOR_UPDATE *pxSensorUpdate )
{
int iStatus = ERROR;
if( NULL != pxSensorUpdate )
{
/* data is mtx protected to allow API to be called from concurrent tasks */
if( GRAB_TX_MUTEX )
{
localData->pxRxData->xLastRequest = *pxSensorUpdate ;
RELEASE_TX_MUTEX;
}
iStatus = OK;
}
return iStatus;
}
Events and Signals¶
Events¶
Each proxy driver defines a list of events (i.e. as an enum) that are publicly available to the application layer above.
An example list for the AMI Proxy Driver might be:
AMI Proxy Driver events
typedef enum AMI_PROXY_DRIVER_EVENTS
{
AMI_PROXY_DRIVER_E_SENSOR_READ_REQUEST = 0,
AMI_PROXY_DRIVER_E_SENSOR_RESET_REQUEST,
AMI_PROXY_DRIVER_E_CLOCK_SHUTDOWN_REQUEST,
/* etc... */
AMI_PROXY_DRIVER_E_RX_MSG_FAILURE,
AMI_PROXY_DRIVER_E_TX_MSG_FAILURE,
MAX_AMI_PROXY_DRIVER_EVENT
} AMI_PROXY_DRIVER_EVENTS;
(This is only an example and is not indicative of what’s in the code)
Each proxy driver holds an EVL (Event Library) record. The record holds a pool of function pointers, defined as:
eventCallback
typedef int ( EVL_CALLBACK )( uint8_t ucModuleId, uint8_t ucEventId, uint8_t ucInstance );
Event binding¶
Each proxy driver also holds a local uint8_t variable to store their “Proxy ID” (a single byte unique to that that proxy driver).
During initialization, the proxy driver takes in a unit8_t variable that the proxy driver stores as their proxy ID.
E.g.:
Example initialisation
int iAMI_PROXY_DRIVER_Initialise( uint8_t ucProxyID, FW_IF_CFG *pxFwIf )
{
int iStatus = ERROR;
if( ( FALSE == pLocalData->iInitialised ) && ( NULL != pxFwIf ) )
{
pLocalData->ucMyID = ucProxyID;
pLocalData->pxFwIf = pxFwIf;
pLocalData->pxFwIf->open( localData->pxFwIf->open );
/* additional setup... */
pLocalData->iInitialised = TRUE;
iStatus = OK;
}
return iStatus;
}
The proxy also provides an API to take in a function pointer (up to EVL_MAX_BINDINGS amount), defined by the application layer, that the proxy driver’s EVL record stores.
E.g.:
Example initialisation
int iAMI_PROXY_DRIVER_BindCallback( xAMI_PROXY_DRIVER_EVENT_CALLBACK *pxEventCallback )
{
int iStatus = ERROR;
if( ( TRUE == pLocalData->iInitialised ) && ( NULL != xpEventCallback ) )
{
iStatus = iEVL_BindCallback( &pLocalData->xEVLRecord, xpEventCallback );
}
return iStatus;
}
The application maintains a list (e.g. enum) of the different Proxy IDs. E.g.:
Example initialisation call
typedef enum AMC_PROXY_DRIVER_IDS
{
AMC_PROXY_DRIVER_ID_AMI = 0x01,
AMC_PROXY_DRIVER_ID_ASC = 0x02,
AMC_PROXY_DRIVER_ID_AFC = 0x03,
/* etc... */
MAX_AMC_PROXY_DRIVER_ID
} AMC_PROXY_DRIVER_IDS;
void vInitialiseLayer_FAL( void )
{
/* FW_IF initialisations and creations */
}
void vInitialiseLayer_ProxyDrivers( void )
{
if( OK == iAMI_PROXY_DRIVER_Initialise( AMC_PROXY_DRIVER_ID_AMI, &xGCQ_IF_Ami )
{
iAMI_PROXY_DRIVER_BindCallback( &iMyAmiCallback );
}
else
{
printf( "Error initialising AMI Proxy Driver\r\n" );
}
if( OK == iASC_PROXY_DRIVER_Initialise( AMC_PROXY_DRIVER_ID_ASC, &xI2C_IF_Sensors )
{
iASC_PROXY_DRIVER_BindCallback( &iMyAscCallback );
}
else
{
printf( "Error initialising ASC Proxy Driver\r\n" );
}
/* etc... */
}
The application defines a local callback that handles the events for the proxy driver. E.g.:
Example event handling
int iMyAmiCallback( uint8_t ucProxyID, uint8_t ucEventID, uint8_t ucInstance )
{
int iStatus = ERROR;
if( AMC_PROXY_DRIVER_ID_AMI == ucProxyID )
{
switch( ucEventID )
{
case AMI_PROXY_DRIVER_E_SENSOR_READ_REQUEST:
{
/* retrieve data first */
if( OK == AMI_PROXY_DRIVER_GetSensorReadRequest( ucInstance, uint8_t &ucRequest ) )
{
/* handle data appropriately, e.g. send it to the relevant subsystem */
if( OK == ASC_PROXY_DRIVER_GetSensorData( ucInstance, ucRequest, &xSensorData ) )
{
iStatus = OK;
}
}
break;
}
/* etc, cases for all the AMI Proxy Driver events... */
default:
break;
}
}
return iStatus;
}
Event Raising¶
The proxy driver raises the events via the EVL. It can also store the unique instance of this event raised for further use (if necessary). E.g.:
Example event calling
/* prepare data for retrieval by the application */
if( GRAB_RX_MUTEX )
{
memcpy( &pLocalData->pxRxData->ucSensorReadRequest, &ucNewSensorReadRequest, sizeof( uint8_t ) );
RELEASE_RX_MUTEX;
}
/* note - the "GRAB/RELEASE RX_MUTEX" should also be used in the "AMI_PROXY_DRIVER_Get..." function that retrieves this same data */
/* raise event */
iEVL_RaiseEvent( &pLocalData->xEVLRecord( pLocalData->ucMyID, AMI_PROXY_DRIVER_E_SENSOR_READ_REQUEST, &ucLastEvRecord );
Note: Not every event has to be associated with data or with a “Get” function. An event may simply be an update that something has occurred, or it may be a single command/request that doesn’t require any further clarity.
Upon an event being raised, the EVL assigns that specific instance a unique value which can be stored by the caller. This instance event is passed through to the application callback, where it can be passed on to any Proxy Driver public API functions. This allows Proxy Drivers to check if an incoming API call is in response to a specific event raised.
It is the responsibility of the Proxy Driver to maintain its own record of event instances, to whatever depth it deems necessary.
Event List¶
ACC Proxy Driver
| Event Name | Module ID | Event ID | Description | Applications handling |
|---|---|---|---|---|
| ACC_PROXY_DRIVER_E_CLOCK_SHUTDOWN_ENABLED | 0x00 | 0x00 | Clock Shutdown enabled for threshold crossing | AMC Main |
| ACC_PROXY_DRIVER_E_CLOCK_SHUTDOWN_DISABLED | 0x01 | Clock Shutdown disabled for threshold crossing | AMC Main | |
| ACC_PROXY_DRIVER_E_CLOCK_SHUTDOWN_ACTIVATED | 0x02 | Report clock shutdown | AMC Main | |
| ACC_PROXY_DRIVER_E_CLOCK_SHUTDOWN_CLOCK_REENABLED | 0x03 | Report clock has been reenabled | AMC Main |
AXC Proxy Driver
| Event Name | Module ID | Event ID | Description | Applications handling |
|---|---|---|---|---|
| AQC_PROXY_DRIVER_E_QSFP_PRESENT | 0x01 | 0x00 | QSFP module (added to AXC proxy) is present, temperature will be polled by the proxy | AMC Main |
| AQC_PROXY_DRIVER_E_QSFP_NOT_PRESENT | 0x01 | QSFP module (added to AXC proxy) is not present, temperature cannot be polled by the proxy | AMC Main |
APC Proxy Driver
| Event Name | Module ID | Event ID | Description | Applications handling |
|---|---|---|---|---|
| APC_PROXY_DRIVER_E_DOWNLOAD_STARTED | 0x02 | 0x00 | Image download to flash, started | AMC Main |
| APC_PROXY_DRIVER_E_DOWNLOAD_COMPLETE | 0x01 | Image download to flash, complete | AMC Main | |
APC_PROXY_DRIVER_E_DOWNLOAD_BUSY | 0x02 | APC busy downloading image to flash (Mutex taken) | AMC Main | |
APC_PROXY_DRIVER_E_DOWNLOAD_FAILED | 0x03 | Image download to flash, failed | AMC Main | |
APC_PROXY_DRIVER_E_FPT_UPDATE | 0x04 | Update FPT | ASDM | |
APC_PROXY_DRIVER_E_COPY_STARTED | 0x05 | Image copy to flash, started | AMC Main | |
APC_PROXY_DRIVER_E_COPY_COMPLETE | 0x06 | Image copy to flash, complete | AMC Main | |
APC_PROXY_DRIVER_E_COPY_BUSY | 0x07 | APC busy copying image to flash (Mutex taken) | AMC Main | |
APC_PROXY_DRIVER_E_COPY_FAILED | 0x08 | Image copy to flash, failed | AMC Main | |
APC_PROXY_DRIVER_E_PARTITION_SELECTED | 0x09 | FPT partition selected | AMC Main | |
APC_PROXY_DRIVER_E_PARTITION_SELECTION_FAILED | 0x0A | FPT partition selection failed | AMC Main |
ASC Proxy Driver
| Event Name | Module ID | Event ID | Description | Applications handling |
|---|---|---|---|---|
| ASC_PROXY_DRIVER_E_SENSOR_UPDATE_COMPLETE | 0x03 | 0x00 | Sensor reading complete with no issues | In-band Telemetry |
| ASC_PROXY_DRIVER_E_SENSOR_UNAVAILABLE | 0x01 | Sensor is reporting as unavailable | In-band Telemetry | |
| ASC_PROXY_DRIVER_E_SENSOR_COMMS_FAILURE | 0x02 | Communication failure when reading sensor | In-band Telemetry | |
| ASC_PROXY_DRIVER_E_SENSOR_WARNING | 0x03 | Sensor is reporting a warning | In-band Telemetry | |
| ASC_PROXY_DRIVER_E_SENSOR_CRITICAL | 0x04 | Sensor is reporting a critical warning | In-band Telemetry | |
| ASC_PROXY_DRIVER_E_SENSOR_FATAL | 0x05 | Sensor is reporting a fatal warning | In-band Telemetry | |
| ASC_PROXY_DRIVER_E_SENSOR_LOWER_WARNING | 0x06 | Sensor reading is low | In-band Telemetry | |
| ASC_PROXY_DRIVER_E_SENSOR_LOWER_CRITICAL | 0x07 | Sensor reading is critically low | In-band Telemetry | |
| ASC_PROXY_DRIVER_E_SENSOR_LOWER_FATAL | 0x08 | Sensor reading is fatally low | In-band Telemetry | |
| ASC_PROXY_DRIVER_E_SENSOR_UPPER_WARNING | 0x09 | Sensor reading is high | In-band Telemetry | |
| ASC_PROXY_DRIVER_E_SENSOR_UPPER_CRITICAL | 0x0A | Sensor reading is critically high | In-band Telemetry | |
| ASC_PROXY_DRIVER_E_SENSOR_UPPER_FATAL | 0x0B | Sensor reading is fatally high | In-band Telemetry |
AMI Proxy Driver
| Event Name | Module ID | Event ID | Description | Applications handling |
|---|---|---|---|---|
| AMI_PROXY_DRIVER_E_PDI_DOWNLOAD_START | 0x04 | 0x00 | Host wants to start a PDI Download | AMC Main |
| AMI_PROXY_DRIVER_E_PDI_COPY_START | 0x01 | Host wants to start a PDI Copy | AMC Main | |
| AMI_PROXY_DRIVER_E_SENSOR_READ | 0x02 | Host wants to read sensor data | In-band Telemetry | |
| AMI_PROXY_DRIVER_E_GET_IDENTITY | 0x03 | Host wants the AMC version information | AMC Main | |
| AMI_PROXY_DRIVER_E_BOOT_SELECT | 0x04 | Host sends boot select request | AMC Main | |
| AMI_PROXY_DRIVER_E_HEARTBEAT | 0x05 | Host wants the current heartbeat counter | None | |
| AMI_PROXY_DRIVER_E_EEPROM_READ_WRITE | 0x06 | Host sends eeprom read write request | In-band Telemetry | |
| AMI_PROXY_DRIVER_E_MODULE_READ_WRITE | 0x07 | Host sends module read write request | In-band Telemetry |
RMI HandlerIN_PROGRESS
Application Behaviour¶
In-Band Telemetry¶
The In-Band Telemetry application handles any requests from the In-Band interface (AMI Proxy) that require data or information from other proxy drivers (primarily the ASC).
This application does not have its own task and operates entirely on events raised by the AMI and ASC proxy drivers.
Out-of-Band Telemetry (IN_PROGRESS)¶
The Out-of-Band Telemetry application handles any requests from the Out-of-Band interface (RMI Handler) that require data or information from other proxy drivers (primarily the ASC).
This application does not have its own task, and operates entirely on events raised by the RMI Handler and ASC proxy drivers.
Page Revision: v. 127