Adding a ML Inference Pipeline¶
Introduction¶
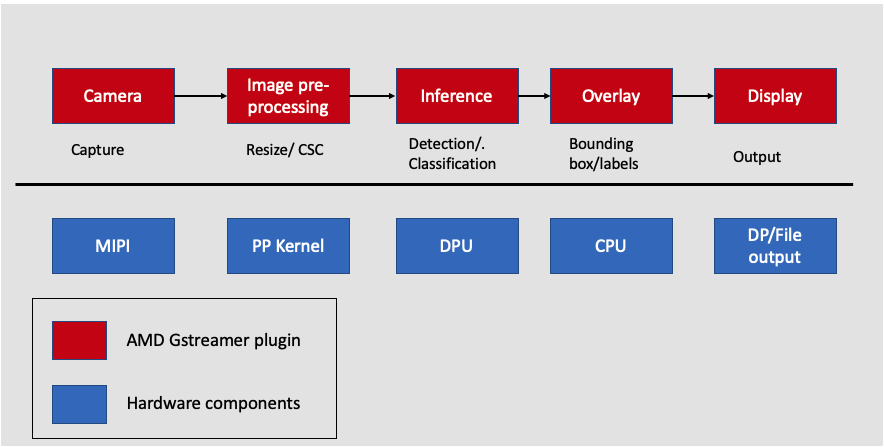
In this step, you build the SmartCam application by adding a ML pipeline to the existing image resizing application. The SmartCam VVAS ML pipeline has built-in machine learning for applications such as pedestrian detection, face detection, and people counting with local display. The ML pipeline consists of a ML inference and ML overlay. The ML inference is performed by the DPU, a hardware component, and a ML overlay, is performed on the CPU by a VVAS software plug-in.
Adding the hardware ML pipeline to the image resizing application involves the following steps:
Adding a quantization function to the pre-processing pipeline
Adding the Vitis AI DPU to the hardware pipeline
Overview of VVAS plug-ins used for SmartCam
PetaLinux firmware
Running the design on the board
Machine Learning Pre-processing¶
In machine learning, data pre-processing is integral in converting input data into a clean data set. A machine learning application receives data from multiple sources using multiple formats; this data needs to be transformed into a format feasible for analysis before being passed to an AI model. The AMD Vitis Vision accelerated library can help you pre-process image data before being feeding it to different deep neural networks (DNNs).
A ML pre-processing pipeline involves the following:
CSC converts the incoming images from one color space to another. One example would be converting the NV12 image from a webcam to the RGB/BGR format expected by the neural network.
Resizing the image changes the resolution of the input image to match the resolution used to train the network.
Additional preprocessing computations such as subtraction, scaling, and threshold calculation.
Pre-processing Function¶
In the previous step, the CSC and resize kernel are built as part of the image resizing application. In this step, you add the pre-processing kernel, which performs quantization. Navigate to kv260/overlays/examples/smartcam and replace the xf_pp_pipeline_accel.cpp with the ml_pre-processing kernel, which performs CSC, resizing, scaling, and mean subtraction.
cd kria_platform/kria-vitis-platforms/kv260/overlays/examples/smartcam/
cp ../../../../../../code_repo_kria_vitis_acceleration_flow_2022.1/ml_inference/vitis_platform_files/xf_pp_pipeline_accel.cpp .
The Vitis Vision library provides a pre-processing function to perform quantization.
template <int INPUT_PTR_WIDTH, int OUTPUT_PTR_WIDTH, int T_CHANNELS , int CPW, int ROWS, int COLS, int NPC, bool PACK_MODE, int X_WIDTH, int ALPHA_WIDTH, int BETA_WIDTH, int GAMMA_WIDTH, int OUT_WIDTH, int X_IBITS, int ALPHA_IBITS, int BETA_IBITS, int GAMMA_IBITS,int OUT_IBITS, bool SIGNED_IN, int OPMODE, int UTH, int LTH>
void preProcess(ap_uint<INPUT_PTR_WIDTH> *inp, ap_uint<OUTPUT_PTR_WIDTH> *out, float params[3*T_CHANNELS], int rows, int cols)
Combining all the previous steps with the pre-processing function looks like the following:
#pragma HLS DATAFLOW
obj_iny.Array2xfMat<INPUT_PTR_WIDTH, XF_8UC1, HEIGHT, WIDTH, NPC>(img_inp_y, imgInput_y, in_img_linestride);
obj_inuv.Array2xfMat<INPUT_PTR_WIDTH, XF_8UC2, HEIGHT/2, WIDTH/2, NPC> (img_inp_uv, imgInput_uv, in_img_linestride/2);
xf::cv::nv122bgr<XF_8UC1, XF_8UC2, XF_8UC3, HEIGHT, WIDTH, NPC, NPC>(imgInput_y, imgInput_uv, rgb_mat);
xf::cv::resize<INTERPOLATION, IN_TYPE, HEIGHT, WIDTH, NEWHEIGHT, NEWWIDTH, NPC, MAXDOWNSCALE>(rgb_mat, resize_out_mat);
xf::cv::preProcess<IN_TYPE, OUT_TYPE, NEWHEIGHT, NEWWIDTH, NPC, WIDTH_A, IBITS_A, WIDTH_B, IBITS_B, WIDTH_OUT,IBITS_OUT>(resize_out_mat, out_mat, params);
xf::cv::xfMat2Array<OUTPUT_PTR_WIDTH, OUT_TYPE, NEWHEIGHT, NEWWIDTH, NPC>(out_mat, img_out, out_img_linestride);
Next Steps¶
This completes the ML pre-processing kernel. The next step is the Adding DPU IP.
Copyright © 2023-2025 Advanced Micro Devices, Inc.